
Глава 4. Механизмы прерывистого и одностороннего движения
Глава 4. Механизмы прерывистого и одностороннего движения
В нашей онлайн базе уже более 10821 рефератов!
Вы можете воспользоваться поиском готовых работ или же получить помощь по подготовке нового реферата практически по любому предмету. Также вы можете добавить свой реферат в базу.
Механизмы прерывистого движения
Мальтийский крест
Мальтийский крест (рис.1) является кривошипно-кулисным механизмом прерывистого движения . Он состоит из кривошипа 4 и креста 1 с лопастями 2 (число лопастей должно быть не меньше трех). Лопасти 2 , имеющие пазы , представляют собой кулисы , по которым перемещается цевка кривошипа 3. Кинематическая схема такого механизма аналогична кинематической схеме обычного кривошипно-кулисного механизма (рис. 2) . Цифрами на рисунке обозначены : 1 — кулиса , 2 — камень кулисы , 3 — кривошип.

Для кривошипно-кулисного механизма верны следующие соотношения :



где  ,
,  ,
,  , остальные величины указаны на рисунке .
, остальные величины указаны на рисунке .
В мальтийском кресте при вращении кривошипа поворот креста осуществляется только тогда , когда цевка кривошипа перемещается в пазу лопасти креста , в этом случае передача работает как обычный кривошипно-кулисный механизм . При повороте кривошипа на угол 2b крест поворачивается на угол 2a . Затем , при завершении кривошипом полного оборота , крест остается неподвижен . На рис. 3 показан характер изменения кинематических параметров движения креста : угла поворота a , угловой скорости w, и ускорения e .

Храповые механизмы
Храповые механизмы — устройства , допускающие вращение оси только в одном направлении и исключающие вращение этой же оси в другом направлении . Он состоит (рис. 4) из храпового колеса и собачки 1 , которая обычно прижимается к колесу пружиной 2 . Используют также храповые механизмы , в которых собачка прижимается к поступательно перемещающейся рейке .
Храповые колеса и собачки изготовляют из сталей 35 , 50 , У10А , 15Х , 20Х , 25ХГСА . Для уменьшения износа или для работы при значительных нагрузках их либо подвергают объемной закалке , либо цементации с последующим закаливанием . В приборостроении для изготовления храповых колес , и иногда собачек , используют также латуни ЛК80-3 , ЛС63-3 и бронзы Бр.КМц3-1. Также используют и сплавы алюминия .

Пружины храпового механизма создают момент , прижимающий собачку к храповому колесу , однако он не предназначен для преодоления сил и моментов , которые могут действовать на собачку от храпового колеса — усилие пружины лишь вводит собачку в зацепление с колесом .Поэтому положение С (рис. 4) оси собачки выбирают таким образом , чтобы равнодействующая окружной силы F и силы трения Fтр Fn создавала бы момент , прижимающий собачку к храповому колесу (а не выводящий ее из зацепления) . Это достигается при условии , что угол установки оси собачки a больше угла трения j . Для обеспечения этого условия необходимо удалить ось собачки С на достаточное расстояние от оси храпового колеса . При этом , однако , следует учесть опасность срыва механизма вследствие переброса собачки на другую сторону храпового колеса ( особенно после некоторого износа) , поэтому слишком большое удаление С от оси колеса также недопустимо . Возможен также вариант установки , когда собачка находится достаточно близко к колесу , но сделана достаточно длинной , в этом случае условие a
Название: Механизмы прерывистого движения
Раздел: Промышленность и производство
Дата публикации: 2007-01-26 18:47:42
Прочтено: 2084 раз
Глава 4. Механизмы прерывистого и одностороннего движения
У этого термина существуют и другие значения, см. Рэтчет (трансформер).
Файл:Sperrklinke Schema.svg Храповой механизм, состоящий из собачки (a
) и зубчатого колеса (
b
)
Храповой механизм ручной лебёдки
Храпово́й механи́зм
(храпови́к) — зубчатый механизм
прерывистого движения
, предназначенный для преобразования возвратно-вращательного движения в прерывистое вращательное движение в одном направлении. Проще говоря, храповик позволяет оси вращаться в одном направлении и не позволяет вращаться в другом. Храповые механизмы используются достаточно широко — например, в турникетах, гаечных ключах, заводных механизмах, домкратах, лебёдках, замках наручников и т. д.
Храповик обычно имеет форму зубчатого колеса с несимметричными зубьями, имеющими упор с одной стороны. Движение колеса в обратную сторону ограничивается собачкой
, которая прижимается к колесу пружиной или под собственным весом.
Ручная барабанная лебедка – разновидности
Ручная лебедка с барабаном – это классика жанра. Кроме общего элемента – шкива, на который наматывается трос, приспособления имеют различные типы привода.
Односкоростной шестеренчатый привод
К барабану прочно прикреплена большая, основная шестерня. На нее, и на крепление, ложится вся нагрузка. Поэтому надежность элементов должна быть на должном уровне. В зацеплении с основной, расположена ведущая маленькая шестеренка.
Соотношение количества зубьев и есть величина передаточного отношения. Проще говоря – коэффициент усиления. Ведущая шестерня составляет одно целое с приводным валом. Поскольку речь идет о ручном инструменте – на вал надета рукоятка для вращения.
Длина рычага также влияет на степень усиления. Чем плечо рукоятки больше – тем меньше усилия надо приложить.
С помощью подобных устройств можно в одиночку поднимать несколько центнеров груза или перемещать автомобиль весом 2-3 тонны. При этом скорость вращения барабана достаточно высокая.
Многоскоростной шестеренчатый привод
Конструкция состоит из двух или более пар шестерен, каждая из которых обладает коэффициентом усиления в десятки раз. При последовательном зацеплении эти коэффициенты складываются, многократно увеличивая усилие.
Обратная сторона медали – пропорциональное снижение скорости. Имея такую лебедку, вы можете осуществлять медленный вертикальный подъем грузов более тонны, но если вам придется работать с двумя мешками цемента – время подъема растянется на десятки минут.
Поэтому производители предоставили возможность использовать каждую пару шестерен в отдельности. Закрепив рукоятку на прямой паре – мы получаем среднее усилие с высокой скоростью. Перекинув ее на вторую пару – теряем в скорости, но увеличиваем силу в два раза.
Обязательным элементом всех лебедок с ручным приводом является стопор, или «собачка»
Работает он по принципу храпового механизма. После прекращения подачи усилия на рукоятку зубья звездочки упираются в стопор, предотвращая разматывание троса под тяжестью груза. Это повышает безопасность, но механизм имеет недостаток.
При подъеме он работает идеально, а вот при спуске совершенно бесполезен. Во время обратного вращения «собачку» просто откидывают в сторону, освобождая храповик.
Червячный привод
Для увеличения усилия применяется червячный механизм. Принцип расчета передаточной пары, по сравнению с плоскими шестернями несколько иной, но техника та же. Небольшая по диаметру винтовая шестерня вращает основную, закрепленную на барабане.
Преимущество конструкции – большой коэффициент усиления. Еще один плюс – конструкция самостопорящаяся. То есть, если не прикладывать усилие к рукояти – машина остановится. Это повышает безопасность и комфорт.
Ручку можно вращать в любую сторону, поднимать и опускать груз – не опасаясь за то, что он сорвется.
Серьезный недостаток конструкции – большое трение в червячной паре. Механизм нуждается в постоянной смазке, иначе износ будет просто катастрофическим. При работе «на сухую» пара может просто заклинить.
Учитывая механику процесса – есть ограничения по весу, с которым можно работать. Зато инструмент получается компактным, и часто применяется именно в домашнем хозяйстве.
Планетарный редуктор
При выдающейся компактности (механизм редуктора фактически находится внутри барабана), количество шестеренчатых пар может доходить до десяти. Усиление при такой конструкции может достигать сотен раз. Единственный недостаток – высокая стоимость изделия, поэтому в быту применяется редко.
Как сделать зажим для ремня храпового механизма
У меня никогда не было настоящего зажима для ремешка, чтобы справиться с неуклюжими ремнями с храповым механизмом и другими, не идеальными методами. Но недавно я купил один, чтобы иметь под рукой, и подумал, что я должен заглянуть внутрь, чтобы увидеть, как это работает:
Большая Энциклопедия Нефти и Газа
Механизм — одностороннее действие
Механизмы одностороннего действия связывают две кинематические цепи и передают движение только в одном направлении. Эти механизмы нашли широкое применение в различных областях современного машиностроения и используются, например, в стопорных механизмах ( остановах) для предотвращения движения в обратном направлении, в обгонных механизмах ( муфтах) для автоматического включения и выключения ведущего и ведомого элементов машин в зависимости от соотношения скоростей этих элементов. В механизмах подач они используются для преобразования колебательного движения в прерывистое поступательное. В импульсных передачах они служат для преобразования колебательного движения в непрерывное вращательное движение в одном направлении. Механизмы одностороннего действия часто используются как предохранительные устройства от обратного хода. [1]
У механизма одностороннего действия перемещение поршня в одну сторону ( в рассматриваемом случае вправо) происходит под действием рабочей жидкости, подаваемой в цилиндр. Перемещение поршня в другую сторону ( влево) происходит под действием пружины 3, когда рабочая жидкость отводится из цилиндра. [3]
Канатно-блочные системы образуют механизм одностороннего действия , работающий на раздвижение грузоподъемника. В обратную сторону секции перемещаются под действием силы тяжести площадки, груза и секций. [4]
Механизмы этого типа представляют собой механизмы одностороннего действия с реверсивным устройством, с ручным или автоматическим управлением. В зависимости от настройки движение от ведущего звена к ведомому может передаваться как в одном, так и в другом направлении. Типичным представителем таких механизмов является самоблокирующийся автомобильный дифференциал. В обычном автомобильном дифференциале при нормальных условиях работы крутящий момент, подведенный к дифференциальной коробке, распределяется поровну между ведущими полуосями. [6]
Пунктирная кривая 2 дает зависимость для механизма одностороннего действия , а кривая / — для механизма двустороннего действия. [8]
На рис. 69 показано конструктивное оформление приспособления с двухрычажным механизмом одностороннего действия . [10]
Реверсивный механизм объединяет две кинематические цепи и представляет собой механизм одностороннего действия с реверсивным устройством, служащим для автоматического или ручного переключения на обратный ход. Типичным представителем такого механизма с автоматически действующим реверсивным устройством является роликовый самоблокирующийся дифференциал, улучшающий тяговую характеристику автомобиля, особенно на скользких участках дороги. Примером реверсивного механизма с ручным управлением является механизм бесступенчатой импульсивной передачи или механизмы монтажных ключей и других устройств. Механизмы одностороннего действия выполняются как храповыми, так и фрикционными. Что же касается механизмов двустороннего действия и реверсивных механизмов, то в подавляющем большинстве они бывают роликовыми. [11]
В храповых стопорных механизмах двустороннего действия ( храповых тормозах, рис. 98, а), характер крутильных колебаний будет отличаться от колебаний механизмов одностороннего действия , так как при колебаниях ведомой системы храповой останов двустороннего действия обладает одинаковой упругой податливостью как при вращении в одну сторону, так и в другую. Если учесть, что под действием демпфирования собственные колебания быстро затухают и остается только установившийся процесс вынужденных колебаний, постоянно поддерживаемый действием возмущающего момента, то второй член уравнения ( 401), будет равен нулю. [12]
Реверсивный механизм объединяет две кинематические цепи и представляет собой механизм одностороннего действия с реверсивным устройством, служащим для автоматического или ручного переключения на обратный ход. Типичным представителем такого механизма с автоматически действующим реверсивным устройством является роликовый самоблокирующийся дифференциал, улучшающий тяговую характеристику автомобиля, особенно на скользких участках дороги. Примером реверсивного механизма с ручным управлением является механизм бесступенчатой импульсивной передачи или механизмы монтажных ключей и других устройств. Механизмы одностороннего действия выполняются как храповыми, так и фрикционными. Что же касается механизмов двустороннего действия и реверсивных механизмов, то в подавляющем большинстве они бывают роликовыми. [13]
Механизм включается при вращении звездочки относительно внешней обоймы по часовой стрелке или, наоборот, обоймы относительно звездочки против часовой стрелки. При этом ролики закатываются в узкую часть пространства между звездочкой и обоймой и заклиниваются между ними, соединяя в одно целое основные элементы механизма. Относительное движение обойм в противоположном направлении заставляет ролики выкатываться в более широкую часть пространства между ними; механизм выключается; при этом становится возможным свободное движение обойм. Ведущим звеном у механизма одностороннего действия может быть как звездочка, так и обойма. [15]
Механизм прерывистого движения
Общие сведения о рычажных, кривошипно-ползунных кулисных, храповых и мальтийских механизмах
В современных приборах и механизмах широкое применения получили рычажные механизмы, кривошипно – ползунные и кулисные механизмы. (рисунок 5.4).
Рисунок 5.4 – Рычажные механизмы
Рычажные (а), кривошипно – ползунные (б) и кулисные механизмы (в) служат для преобразования вращательного движения кривошипа в возвратно- поступательное движение исполнительного органа.
Рычажныемеханизмы применяются в различного рода станках, кривошипно-ползунные – в поршневых двигателях, компрессорах, кулисные– в строгальных станках.
Кулачковыемеханизмы применяются в случаях, когда перемещение, скорость и ускорение ведомого звена происходит по заранее заданному закону.
Чаще всего кулачковые механизмы состоят из 3-х звеньев (рисунок 5.5, а):
— 4 – ролик (рисунок 5.5, б).
Рисунок 5.5 – Кулачковые механизмы
Храповые механизмы – служат для осуществления прерывистых движений (рисунок 5.6). Они применяются для подачи материала в различных станках, тормозных устройствах, часах.
Рисунок 5.6 – Храповой механизм
Храповой механизм состоит из:
— собачки с пружиной 2;
Храповые механизмы бывают 2-х классов:
1. Механизм, в котором храповик задерживается собачкой в одном направлении (храповик с острыми зубьями).
2. Механизм, в котором храповик задерживается собачкой в 2-х направлениях (зубья симметричны).
Мальтийский механизм – применяется для преобразования непрерывного вращения ведущего звена 1 в прерывистое вращение ведомого звена 3 (рисунок 5.7)

Рисунок 5.7 – Мальтийский механизм
Механизм состоит из:
— ведущего звена 1;:
— ведомого звена (креста 3).
Мальтийские механизмы изготавливают с тремя, четырьмя, пятью, шестью и восемью прорезями креста, что соответствует 1/3, 1/4, 1/5, 1/6 и 1/8 оборотам ведомого звена за один полный оборот ведущего звена.
Контрольные вопросы
1. Как классифицируются механические передачи?
2. Как определяется передаточное число и ККД многоступенчатой передачи?
3. Какие преимущества и недостатки фрикционных передач?
4. Какие материалы применяются для изготовления рабочих поверхностей фрикционных передач?
5. Какие устройства называются вариаторами?
6. Что такое диапазон регулирования вариаторов и как он определяется?
Дата добавления: 2014-12-07 ; Просмотров: 1391 ; Нарушение авторских прав?
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
§ 4. РЕВЕРСИВНЫЕ И ХРАПОВЫЕ МЕХАНИЗМЫ
— это устройства, изменяющие направление вращательного или поступательного движения. Конструкции их разнообразны, принципиально они сводятся к двум типам: механизмы с цилиндрическими зубчатыми колесами и коническими (рис. 63).
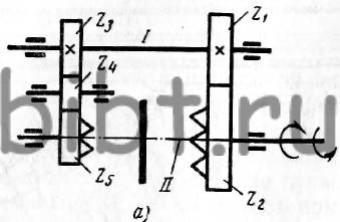
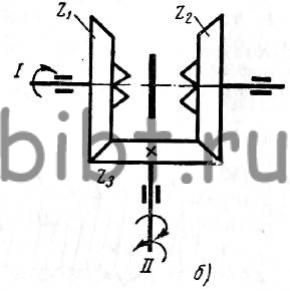
Рис. 63. Схемы реверсивных механизмов: а — с цилиндрическими, б — с коническими зубчатыми колесами
У механизма первого типа (рис. 63, а) движение передается с вала I на вал II. Жестко закрепленные зубчатые колеса z 3 и z 1 передают вращательное движение зубчатым колесам z 5 b z 2 , при этом колесо z 5 вращается свободно на валу II в одну сторону, а z 2 — в другую. Присоединение кулачковой муфты к одному из зубчатых колес сообщит валу II направление вращения сцепленного с муфтой зубчатого колеса.
Конический реверсивный механизм (рис. 63, б) состоит из трех конических зубчатых колес и двух валов: ведущего I и ведомого II. Зубчатое колесо z 1 может вращать колесо z 3 в одном направлении, а z 2 — в другом.
Переключая муфту к колесу z 1 или колесу z 2 , колесу z 3 сообщают различные направления вращения.
Храповые механизмы. Для осуществления прерывистого движения, каким является подача у строгальных и долбежных станков, применяют храповые механизмы, состоящие из храпового колеса и собачки (рис. 64, а).
При повороте рычага 3 против часовой стрелки находящаяся на нем собачка 2 поворачивает храповое колесо 1. При повороте рычага по часовой стрелке собачка 2 проскакивает по зубьям храпового колеса 1, не захватывая их. Чем больше угол поворота рычага 3, тем большее число зубьев проскакивает собачка, чтобы захватить их при новом движении против часовой стрелки.
При каждом двойном ходе ползуна строгального станка рычаг также делает двойной ход и поворачивает храповик на а зубьев, что составляет
n =a/ z х.р оборотов, (48)
где z х.р — число зубьев на храповом колесе;
а —число зубьев, захватываемых собачкой за один двойной ход.

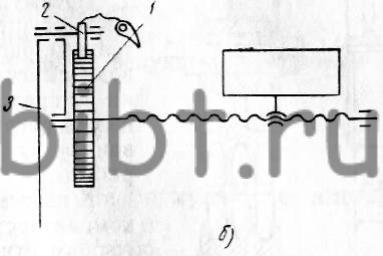
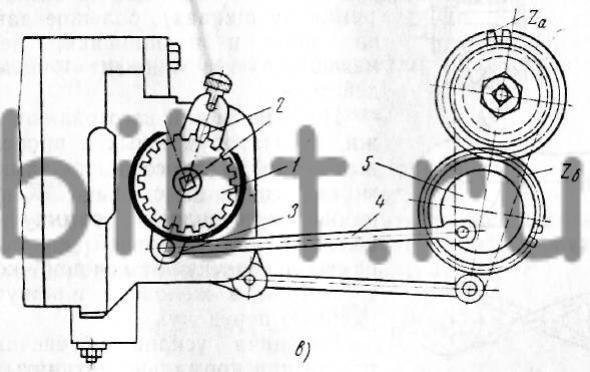
Рис. 64. Схемы храповых механизмов:
а — одностороннего, б — с винтом, в — двустороннего; 1 — храповое колесо,
2 — собачка, 3 — рычаг, 4 — тяга, 5 — кривошипный диск
Обычно храповой механизм объединяют с винтовым (рис. 64, б), получая таким образом прерывистое прямолинейное движение в одном направлении.
У храповых механизмов, рассчитанных на подачу в двух противоположных направлениях, применяют храповые механизмы с перекидной собачкой (рис. 64, в).
Механизмы прерывистого (периодического) движения




![]()
![]()
![]()
![]()
Кривошипные и кулачковые механизмы работают с периодическим изменением направления и скорости движения ведомого звена. При этом начальное и конечное положения этого звена повторяются периодически, не меняясь. Ведомое звено движется непрерывно, за исключением участка кулачка (кулачкового механизма), соответствующего выдержке (когда рабочий орган неподвижен).
В ряде случаев необходимо периодически перемещать в одном направлении ведомое звено, например, подавать инструмент на глубину резания в строгальных станках, поворачивать револьверную головку. Движение при этом происходит кратковременно, толчком. Для этого служат храповые и мальтийские механизмы.
Храповые механизмы могут быть с наружным и внутренним зацеплением. Вмеханизме с наружным зацеплением (рис. 3.27, а) собачке 3 сообщается качательное движение. При движении против часовой стрелки собачка через зубья храпового колеса 2 поворачивает его на некоторый угол. При обратном ходе собачка, проскальзывая по зубьям храпового колеса, не вращает его. Качательное движение собачка 3 получает через шатун от ведущего кривошипного диска 6 с пальцем 5. Изменение положения пальца 5 в пазу (т.е. изменение радиуса R) позволяет регулировать угол поворота a собачки 3. Другим способом изменять угол поворота храпового колеса при неизменном положении кривошипного пальца 5 можно щитком 4, который закрывает часть зубьев храпового колеса, и собачка в начальный период рабочего движения скользит по его поверхности, а затем сходит с него, попадая на зуб храпового колеса, и поворачивает его. Щиток в выбранном положении удерживает фиксатор 1.
В храповом механизме с внутренним зацеплением (см. рис. 3.27, б) вал с жестко посаженным на нём диском, к которому прикреплена собачка 3, имеет качательное движение, и собачка, вращаясь по часовой стрелке, поворачивает храповое колесо 2. Когда собачка движется в обратном направлении, храповое колесо неподвижно.
Мальтийские механизмы применяют для того, чтобы периодически поворачивать на определённый угол 2b ведомое звено — многопазовый диск («мальтийский крест») 1 (рис. 3.28) при равномерном повороте ведущего звена — кривошипного диска 3. За часть оборота кривошипного диска 3 (угол 2a), когда происходит поворот диска 1, кривошипный палец (цевка) 2 вводится в радиальный паз и выводится из него. В момент вывода пальца из одного паза следующий паз оказывается в положении, при котором палец может быть снова введён в него. Для смягчения удара палец должен входить в паз в строго радиальном направлении. На угол 2g кривошип поворачивается вхолостую. Если у кривошипного диска 3 два пальца, то за один его оборот многопазовый диск 1 поворачивается дважды, каждый раз на угол 2b.
Узлы и механизмы полиграфического оборудования. Зубчатые механизмы. Прочностные расчеты зубчатых передач , страница 23
[p] – допускаемое давление.
Нагрузка на ведущую ветвь цепи зависит от многих факторов, поэтому сила, которую может передать цепь, равна:
 ,
,
где F=0,28t 2 – для однорядных роликовых цепей (t – шаг цепи);
mp— коэффициент рядности цепи (при числе рядов цепи 1; 2; 3 соответствующие mp=1; 1,7; 2,5);
Kэ— коэффициент эксплуатации.
Коэффициент эксплуатации Kэ может быть представлен в виде
 , где учитывают коэффициенты:
, где учитывают коэффициенты:
Kд— динамические нагрузки (при спокойной работе, нагрузки с легкими толчками и ударами Kд=1; 1,2…1,5; 1,8 соответственно);
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им. Даля 166
- ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГМУ 1966
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им. Дегтярева 174
- КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МГПУ 165
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им. Макарова 543
- НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им. Герцена 123
- РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им. Гагарина 114
- СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СФУ 2424
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им. Каразина 305
- ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Полный список ВУЗов
- О проекте
- Реклама на сайте
- Правообладателям
- Правила
- Обратная связь
Чтобы распечатать файл, скачайте его (в формате Word).
Механизмы прерывистого движения
Механизмы прерывистого движения применяются в приводах станков для обеспечения периодических перемещений их рабочих органов.
В механизмах, схемы которых показаны на рис. 2.7, ведущий вал I совершает непрерывное вращательное движение, ведомый II – прерывистое, т.е. периодически поворачивается на угол, равный 2π·i, где i – передаточное отношение механизма.
Рассмотрим некоторые механизмы прерывистого движения.
2.2.7.1Храповые механизмы
В храповых механизмах (см. рис. 2.7,а,б) непрерывно вращающийся с ведущим валом кривошип (кривошипный диск) 1 через шатун 2 сообщает возвратно-качательное движение коромыслу 3 с собачкой (защёлкой) 4. Собачка при своём движении в одном направлении прощёлкивает по зубьям храповика (храпового колеса) 5, закреплённого на ведомом валу, а в другом, упираясь (будучи подпружиненной) в зуб храповика, обеспечивает его поворот вместе с коромыслом. Чтобы храповик произвольно не поворачивался при возврате собачки, предусматривают фиксатор 6. Храповик может иметь наружные (а), внутренние (б) или торцевые зубья.
Направление поворота ведомого вала постоянно и не зависит от направления вращения ведущего вала.
Собачка может приводиться и иным образом, например, она может находиться на штанге 1 (см. рис. 2.7,в), перемещающейся возвратно-поступательно.
Передаточное отношение механизма:  ,
,
где Z – число зубьев на храповике;
а – число зубьев храповика, захватываемых собачкой за один её ход.
Регулирование величины периодического перемещения, производимого посредством храпового механизма, может производиться:
— изменением угла качания коромысла с собачкой, что достигается изменением радиуса кривошипа (см. рис.2.7,а,б) или коромысла;
— изменением длины хода штанги с собачкой (см. рис.2.7,в);
— перекрытием с помощью специального щитка 4 (см. рис. 2.7,г) зубьев храповика на части дуги, описываемой собачкой, или автоматическим подъёмом собачки на части этой дуги.
Поворот храповика за один ход собачки может достигать 90-100 , однако в большинстве случаев он не превышает 45 .
Если механизм должен обеспечивать реверс ведомого вала, то храповик выполняют с зубьями симметричной формы, а собачку делают перекидной или поворотной.
Храповые механизмы часто используются для обеспечения прямолинейной периодической подачи рабочих органов строгальных, долбежных, шлифовальных и других станков: собачка периодически поворачивает на определённый угол храповик, кинематически связанный с ходовым винтом, который и осуществляет требуемое прямолинейное перемещение стола, суппорта и т.д.
При помощи храповой передачи может осуществляться также и круговое периодическое перемещение.
2.2.7.2Мальтийские механизмы
Мальтийские механизмы предназначены для поворотов ведущего вала на большие углы, например 60 о , 90 о или 180 о . Их обычно используют для периодических поворотов шпиндельных блоков токарных автоматов и полуавтоматов, револьверных головок в токарно-револьверных станках и автоматах, многопозиционных столов и т.д.
На ведущем валу механизма (см. рис. 2.7,д,е) закреплено водило 1, выполненное в виде рычага (д) или диска (е), с пальцем 2. Палец при повороте водила входит в одну из радиальных прорезей (пазов) диска («мальтийского креста») 3, поворачивает его и выходит из прорези. Далее водило совершает холостую часть хода, а диск от самопроизвольного проворота фиксируется каким-либо устройством. Один из возможных вариантов такого устройства (см. рис. 2.7,д,) содержит закреплённый на оси водила фиксирующий диск с выемкой; мальтийский крест также имеет дуговые выемки. Поворот креста становится возможным, когда фиксирующий диск поворачивается к нему своей выемкой.
Передаточное отношение механизма:  ,
,
где а – число пальцев на водиле;
Z – число прорезей на мальтийском кресте.
Мальтийские механизмы не допускают регулирования передаточного отношения. Оно «заложено» в конкретной конструкции. Однако если в кинематическую цепь между мальтийским механизмом и поворачиваемой частью станка ввести передачи с регулируемым передаточным отношением, то можно регулировать угол поворота этой части при неизменном угле поворота креста.
Мальтийские механизмы бывают т.н. правильные и не правильные. У правильных механизмов крест имеет пазы с равномерным шагом; у не правильных углы между смежными пазами креста различные. В станках используются, в основном, правильные мальтийские механизмы с внешним зацеплением и радиальными пазами. Рассмотренные механизмы являются плоскими и располагаются на параллельных валах. Существуют сферические мальтийские механизмы, обеспечивающие передачу периодических движений между взаимно перпендикулярными валами, но в станках они используются весьма редко.
2.2.7.3 Другие механизмы для осуществления периодических движений
Для осуществления периодических движений в станках применяются устройства механические, гидравлические, пневматические, электрические и различные комбинированные. К числу механических, кроме более распространенных храповых и мальтийских, относятся кулачковые механизмы, неполнозубые передачи и другие устройства.
В неполнозубой передаче (см. рис. 2.7,ж) ведомое колесо Z2 имеет полный зубчатый венец, а ведущее Z1 – зубья только на части окружности. Ведомое колесо поворачивается лишь тогда, когда с его зубьями сцепляются зубья неполнозубого ведущего колеса (или зубчатого сектора).
Передаточное отношение механизма:  .
.
В механизме должно быть предусмотрено устройство, фиксирующее ведомое колесо от проворота, когда оно не сцеплено с сектором. Передачи такого типа работают с ударами в моменты начала и конца зацепления, что является их недостатком.
База знаний студента. Реферат, курсовая, контрольная, диплом на заказ
Механизмы прерывистого движения — Техника
Механизмы прерывистого движения
(реферат по основам конструирования приборов)
Мальтийский крест (рис.1) является кривошипно-кулисным механизмом прерывистого движения . Он состоит из кривошипа 4 и креста 1 с лопастями 2 (число лопастей должно быть не меньше трех). Лопасти 2 , имеющие пазы , представляют собой кулисы , по которым перемещается цевка кривошипа 3. Кинематическая схема такого механизма аналогична кинематической схеме обычного кривошипно-кулисного механизма (рис. 2) . Цифрами на рисунке обозначены : 1 — кулиса , 2 — камень кулисы , 3 — кривошип.
Для кривошипно-кулисного механизма верны следующие соотношения :
где , , остальные величины указаны на рисунке .
В мальтийском кресте при вращении кривошипа поворот креста осуществляется только тогда , когда цевка кривошипа перемещается в пазу лопасти креста , в этом случае передача работает как обычный кривошипно-кулисный механизм . При повороте кривошипа на угол 2b крест поворачивается на угол 2a . Затем , при завершении кривошипом полного оборота , крест остается неподвижен . На рис. 3 показан характер изменения кинематических параметров движения креста : угла поворота a , угловой скорости w, и ускорения e .
Храповые механизмы — устройства , допускающие вращение оси только в одном направлении и исключающие вращение этой же оси в другом направлении . Он состоит (рис. 4) из храпового колеса и собачки 1 , которая обычно прижимается к колесу пружиной 2 . Используют также храповые механизмы , в которых собачка прижимается к поступательно перемещающейся рейке .
Храповые колеса и собачки изготовляют из сталей 35 , 50 , У10А , 15Х , 20Х , 25ХГСА . Для уменьшения износа или для работы при значительных нагрузках их либо подвергают объемной закалке , либо цементации с последующим закаливанием . В приборостроении для изготовления храповых колес , и иногда собачек , используют также латуни ЛК80-3 , ЛС63-3 и бронзы Бр.КМц3-1. Также используют и сплавы алюминия .
Пружины храпового механизма создают момент , прижимающий собачку к храповому колесу , однако он не предназначен для преодоления сил и моментов , которые могут действовать на собачку от храпового колеса — усилие пружины лишь вводит собачку в зацепление с колесом .Поэтому положение С (рис. 4) оси собачки выбирают таким образом , чтобы равнодействующая окружной силы F и силы трения Fтр Fn создавала бы момент , прижимающий собачку к храповому колесу (а не выводящий ее из зацепления) . Это достигается при условии , что угол установки оси собачки a больше угла трения j . Для обеспечения этого условия необходимо удалить ось собачки С на достаточное расстояние от оси храпового колеса . При этом , однако , следует учесть опасность срыва механизма вследствие переброса собачки на другую сторону храпового колеса ( особенно после некоторого износа) , поэтому слишком большое удаление С от оси колеса также недопустимо . Возможен также вариант установки , когда собачка находится достаточно близко к колесу , но сделана достаточно длинной , в этом случае условие a 0 ) . У такой конструкции при малом окружном шаге зубьев зуб колеса получается ослабленным.
Модуль зубьев храпового колеса , где pt — окружной шаг зубьев храпового колеса по окружности впадин , определяют из расчета по среднему допускаемому давлению используя соотношение:
где — окружная сила (М — крутящий момент на оси колеса , d — диаметр впадин зубьев храпового колеса , d=mz — m- модуль , z — число зубьев ) ; [p] — допускаемое давление на единицу ширины зуба храпового колеса (справочная величина) ; , b -ширина колеса .
В часовых механизмах используется конструкция , показанная на рис. 6 . Вместо храпового колеса в ней использовано обычное колесо с зубьями часового профиля , что упрощает конструкцию вследствие сокращения числа колес в механизме . Собачка 1 , имеющая несколько выступов , удерживается на оси винтом 4 . При подзаводке часов (рис. 6а) момент Мзав отводит собачку , прижимающуюся под действием пружины 3 одним из своих выступов к зубьям колеса 2 . Выступ собачки захватывает конец Д пружины 3 , деформируя последнюю , конец пружины Г закреплен неподвижно . При стопорящем положении собачки (рис. 6б) , когда она удерживает колесо 2 , зуб колеса упирается в один из выступов собачки . При переходе из одного положения в другое храповое колесо немного поворачивается , вследствие чего напряжение заводной пружины после тугого завода ослабляется , что увеличивает срок ее службы и стало возможным благодаря применению собачки с несколькими выступами .
Храповые механизмы могут обеспечивать преобразование вращательного движения в колебательное , и наоборот . Так , в храповом механизме электрических часов (рис. 7) , две толкающие собачки 1 и 3 преобразуют качание якоря 2 в прерывистое вращение храпового колеса 4.
При перемещении якоря в прямом и обратном направлениях собачки попеременно захватвают и толкают зубья колеса .
Условные обозначения храповых механизмов для схем показаны на рис. 8 : а — односторонний храповой механизм с наружным зацеплением ; б — двусторонний храповой механизм с наружным зацеплением ; в — односторонний храповой механизм с внутренним зацеплением .
“Элементы приборных устройств” под. ред. О.Ф. Тищенко , Часть 1 , Москва “Высшая школа” , 1982
Котов В.Э ФН2-41 Механизмы прерывистого движения (реферат по основам конструирования приборов) Мальтийский крест Мальтийский крест (рис.1) является кривошипно-кулисным механизмом прерывистого движения . Он состоит из кривоши

