
Управление симисторами в схемах на микроконтроллере
Регулятор мощности на микроконтроллере
Достоинствами этой конструкции является: простота самостоятельного изготовления, дешевизна и лёгкая управляемость. Минусами можно считать то, что нормальная работа схемы происходит только только с нагрузками до 150-200 Ватт, при более мощной нагрузке возникает гул и генерируются радиопомехи.
При первом включении схеме на сегментном индикаторе горит цифра 0. Включение и отключение осуществляется одномоментным нажатием и удержанием двух кнопок-микропереключателей. Регулировка больше-меньше – каждым нажатием по отдельности. Если не нажимать ни на один из тумблеров, то после последнего нажатия через два часа регулятор отключится самостоятельно, индикатор до тех пор будет моргать на ступени последнего рабочего уровня потребляемой мощности.

В момент отключения устройства от сети запоминается последний уровень выдаваемой мощности, который будет автоматически задан при очередном включении. Регулировка осуществляется в диапазоне от 0 до 9 и далее от А до F. То есть всего имеется 16 ступеней регулировки.
Радиатор на фото выше достаточно большой, конструкция позволяет поставить вариант и по меньше, но другого у меня не было. При первом включении устройства у меня на дисплее моргал 0, на нажатие кнопок схема не реагировала. Заменив конденсатора по питанию на номинал 1000 мкФ,проблема исчезла.
Печатная плата в формате Sprint Layout и прошивка микроконтроллера размещены в одном архиве по ссылке выше.
Схема используется для плавного регулирования мощности в нагрузке. В основу способа управления положен метод фазового управления симистором. Сущность его заключается в пропуске части полупериода переменного сетевого напряжения. Ток поступающий в нагрузку пропорционален интегралу полученного сигнала. Основа конструкции микроконтроллер PIC16F1823.

Устройство поддерживает работу с активной (лампа накаливания, нагреватель) и индуктивной нагрузкой. Тактирование микроконтроллера осуществляется от внутреннего генератора. Сигнал синхронизации с сетью поступает с выпрямительного моста на вход внутреннего компаратора микроконтроллера через фильтр на R10, C5, R9, R8, C3. Опорное напряжение компаратора поступает с внутреннего ЦАП микроконтроллера и равно около 0,6 В, которое задается при конфигурации МК. Для устранения влияния емкости C6 на синхронизацию применяется диод D6. Индикация выполнена на E30561 с общим катодом.

Конструктивно устройство собрано на двух печатных платах. На одной распологаются индикатор и управляющие кнопки, а на другой МК, блок питания и симистор. Соединение плат выполнено проводом МГТФ.
С радиатором для симистора (HS-135-38), как на рисунке максимальная мощность нагрузки около 500 Вт. Соответственно под этот радиатор и сделано посадочное место на печатной плате.
Прошивка для МК выполнена в среде MPLAB на языке С для компилятора HI-TECH PICC 9.83. Скачать печатные платы, прошивку и проект MPLAB вы можете по ссылке выше.
Регулирование конструкции происходит с помощью симистора типа BT138. Управление которым осуществляется посредством МК. Цифровой LED дисплей показывает на сколько процентов в текущий момент времени открыт симистор. Логическая часть схемы получает питание от блок питания, основа которого стабилизатор напряжения DA1 7805.
Схемы регуляторов мощности (диммеров) на симисторах.
Принцип работы симисторных регуляторов мощности (напряжения) в цепях
переменного тока.
Что такое симистор, принцип его работы, а также справочные характеристики некоторых популярных приборов мы с Вами внимательно рассмотрели на странице  Ссылка на страницу.
Там же мы отметили, что симистор пришёл на смену рабочей лошадке-тиристору и практически полностью вытеснил его из электроцепей переменного тока.
Вспомним пройденный материал.
Отличительной чертой симистора является то, что при подаче на его управляющий электрод тока (напряжения), прибор переходит в проводящее состояние, замыкая нагрузку, причём проводит ток, независимо от полярности, приложенного к нагрузке напряжения.
Полярность открывающего напряжения должна быть либо отрицательной для обеих полярностей напряжения на условном аноде, либо совпадать с полярностью «анодного» напряжения (т.е. быть плюсовой в момент прохождения положительной полуволны и минусовой — в момент прохождения отрицательной).
Итак. Важным плюсом симисторных схем в электроцепях переменного тока является отсутствие выпрямительных устройств, и двухполюсность напряжения в нагрузке, что даёт возможность подключать их, помимо всего прочего, как трансформаторам, так и электродвигателям переменного тока.
Познакомимся с расхожими схемами симисторных регуляторов.
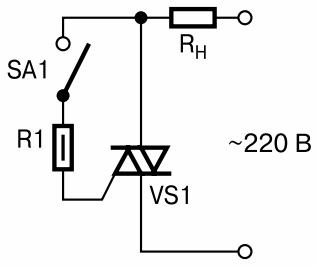
Для начала давайте рассмотрим простейшую, но вполне себе работоспособную схему симисторного регулятора мощности с фазово-импульсным управлением, позволяющего работать с нагрузками вплоть до 1200 Вт.
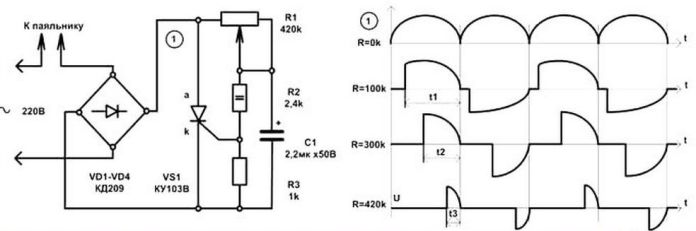
Рис.1
При замене симистора на другой, с большей величиной допустимого тока, мощность нагрузки можно увеличивать практически неограниченно.
А теперь — как это всё работает?
В начале действия положительного полупериода симистор закрыт. По мере увеличения сетевого напряжения конденсатор С1 заряжается через последовательно соединённые резисторы R1 и R2. Причём увеличение напряжения на конденсаторе С1 отстаёт (сдвигается по фазе) от сетевого на величину, зависящую от суммарного сопротивления резисторов и номинала ёмкости С1. Чем выше значения резисторов и конденсатора — тем больше сдвиг по фазе.
Заряд конденсатора продолжается до тех пор, пока напряжение на нём не достигнет порога пробоя динистора (около 35 В). Как только динистор откроется (следовательно, откроется и симистор), через нагрузку потечёт ток, определяемый суммарным сопротивлением открытого симистора и нагрузки.
При этом симистор остаётся открытым до конца полупериода, т.е. момента, когда полуволна сетевого напряжения приблизится к нулевому уровню.
Переменным резистором R2 устанавливают момент открывания динистора и симистора, производя тем самым регулировку мощности, подводимой к нагрузке.
При действии отрицательной полуволны принцип работы устройства аналогичен.
Диаграммы напряжения на нагрузке при различных значениях переменного резистора приведены на Рис.1 справа.
Для предотвращения ложных срабатываний триаков, вызванных переходными процессами в индуктивных нагрузках (например, в электродвигателях и обмотках трансформаторов), симисторы должны иметь дополнительные компоненты защиты. Это, как правило, демпферная RC-цепочка (снабберная цепь) между силовыми электродами триака, которая используется для ограничения скорости изменения напряжения (на схеме Рис.1 показана синим цветом).
В некоторых случаях, когда нагрузка имеет ярко выраженный ёмкостной характер, между силовыми электродами необходима индуктивность для ограничения скорости изменения тока при коммутации.
Существуют и различные модификации приведённой выше простейшей схемы диммера.
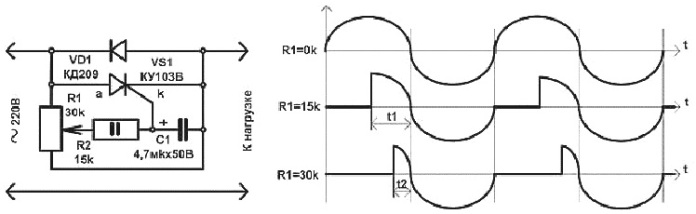
Рис.2
Дополнительная цепочка R3 C2 (Рис.2 слева) призвана увеличить максимально достижимый фазовый сдвиг между сетевым напряжением и напряжением, поступающим на левый вывод динистора, что в свою очередь позволяет производить более глубокую регулировку мощности, подводимой к нагрузке.
На схеме, приведённой на Рис.2 справа, цепь, образованная диодами D1, D2 и резистором R1, обеспечивает плавность регулировки при минимальной выходной мощности. Без неё характеристика управления регулятором имеет гистерезис, что проявляется в скачкообразном повышении регулируемой мощности от нуля до 3. 5% от максимальной.
Диодно-резисторная цепочка разряжает конденсатор при переходе сетевого напряжения от отрицательной к положительной полуволне и, тем самым, устраняет эффект скачкообразного начального увеличения мощности в нагрузке.
Изредка можно встретить устройства, в которых регулировка мощности производится посредством отдельной схемы, которая формирует импульсы с регулируемой длительностью для управления симистором.
Такие диммеры обладают значительно лучшими характеристиками, чем представленные выше, однако обратной стороной медали является повышенная сложность устройств и необходимость наличия отдельного источника питания схемы. Исключения составляют устройства, выполненные на специализированных ИМС. Примером такой микросхемы является фазовый регулятор КР1182ПМ1. 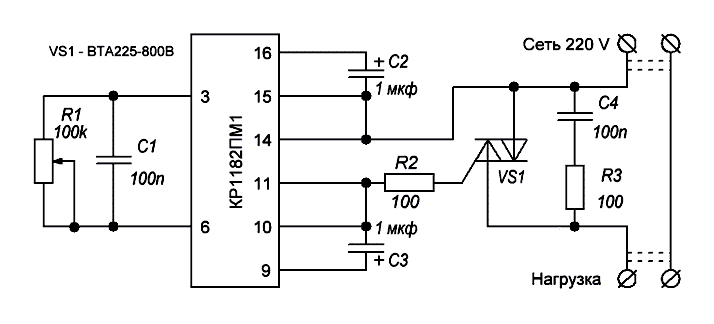
Рис.3
Применение КР1182ПМ1 в регуляторах мощности (Рис.3) позволяет добиваться как хорошей повторяемости, так и широкого диапазона перестройки и высокой температурной стабильности.
А если уж мы решили заморачиваться созданием отдельной схемы формирования управляющих импульсов, то имеет смысл отказаться от фазово-импульсного метода управления, и обратиться в сторону регуляторов мощности, работающих по принципу пропускания через нагрузку определённого целого числа периодов сетевого напряжения в единицу времени.
При таком способе регулирования появляется возможность включения симистора вблизи точки пересечения сетевым переменным напряжением нулевого потенциала, вследствие чего радикально снижается уровень помех, вносимых в электросеть.
Освещение таким диммером не запитаешь ввиду заметного мерцания, а вот для беспомехового регулирования мощности электронагревательных приборов — самое то.
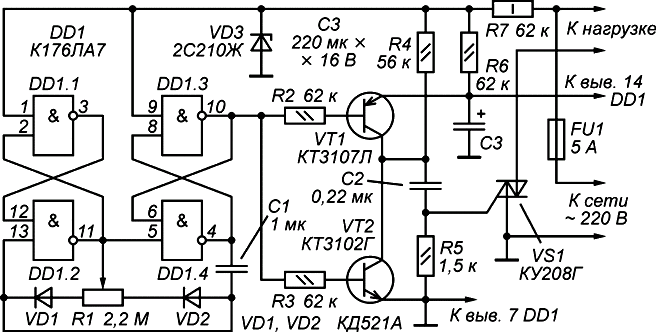
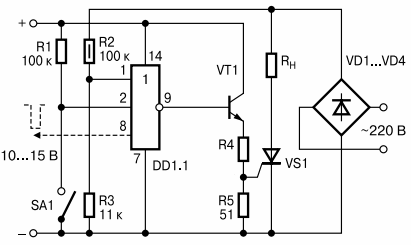
Данная схема (Рис.4) перекочевала со страницы https://www.radiokot.ru/circuit/power/converter/50/ и представляет собой модификацию регулятора мощности, описанного в журнале Радио, 2009, № 9, с. 40–41 «В.Молчанов Симисторный регулятор мощности». Вот, что пишет автор.
«Устройство предназначено для беспомехового регулирования мощности электронагревательных приборов, работающих от сети переменного тока 220 В.
Кроме снижения уровня коммутационных помех, в регуляторе реализован принцип пропускания в нагрузку целого числа периодов сетевого напряжения. При таком способе регулирования с высокой точностью обеспечивается отсутствие постоянной составляющей напряжения на нагрузке, вследствие чего дополнительно снижается уровень искажений, вносимых в электросеть. Это особенно важно в случае мощной нагрузки.
Максимальная мощность нагрузки, подключаемой к регулятору, составляет 1 кВт. Потребляемый регулятором ток от сети не превышает 4 мА (действующее значение), типовое потребление – 3,5 мА.
На микросхеме DD1 и элементах R1, C1, VD1, VD2 выполнен синхронизированный с сетью генератор прямоугольных импульсов. Период импульсов, вырабатываемых генератором, составляет около 1,3 с. Резистор R1 регулирует скважность импульсов. Элементы DD1.1, DD1.2 и DD1.3, DD1.4 включены как два RS‑триггера, на входы которых (выводы 1 и 9 микросхемы) через делитель R7R6 поступает часть сетевого напряжения. Транзисторы VT1 и VT2 выполняют функцию мощного инвертора логических сигналов для управления симистором. Питание устройства осуществляется через параметрический стабилизатор, в котором задействованы балластный резистор R7, стабилитрон VD3 и сглаживающий конденсатор C3. Когда напряжение на верхнем по схеме сетевом выводе относительно нижнего отрицательное, стабилитрон VD3 пропускает ток в прямом направлении, когда положительное – ограничивает напряжение на выводах 1 и 9 микросхемы DD1 на уровне 10 В. Ток, проходящий через эти выводы и внутренние защитные диоды микросхемы, заряжает конденсатор C3 до напряжения около 9,2 В, которое служит для питания низковольтной части устройства. Использование защитных диодов микросхемы не приводит к её защёлкиванию, поскольку амплитудное значение тока через резистор R7 ограничено и составляет около 5 мА.
Во время проверки регулятора мощности удобно в качестве нагрузки подключить лампу накаливания (желательно на 100 Вт или более). Устройство обычно не нуждается в налаживании, но если оказалось, что симистор VS1 открывается ненадёжно (лампа в нагрузке не включается или мерцает), можно попробовать уменьшить сопротивление резистора R4 или подобрать экземпляр симистора с меньшим током открывания. Резистор R4 позволяет выставить мгновенное напряжение сети, при котором происходит открывание симистора. Это напряжение может быть рассчитано по формуле Uпор ≈ Uпит∙R7/(2∙R4), где Uпит ≈ 9,2 В – напряжение на конденсаторе C3, сопротивления резисторов R6 и R7 должны быть равны. Уменьшение сопротивления резистора R4 обеспечивает более надёжное открывание симистора, но увеличивает уровень создаваемых помех, поэтому делать его сопротивление менее 30 кОм нежелательно».
И конечно, было бы совсем неправильно не упомянуть о таком важном представителе симисторного семейства, как — оптосимистор.
Оптосимистор включается посредством освещения полупроводникового слоя и представляет собой комбинацию оптоизлучателя и симистора в одном корпусе. Преимущество — простая однополярная схема управления и гальваническая изоляция цепей управления от фаз сетевого напряжения.
Оптосимисторы могут коммутировать нагрузку как сами (Рис.5),
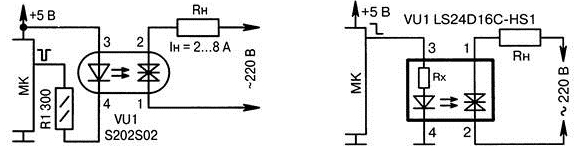
Рис.5
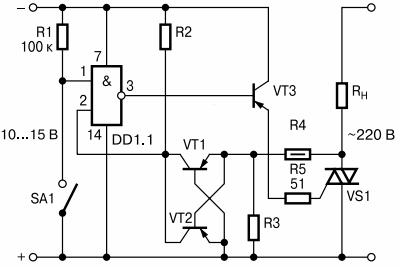
так и управлять более мощными симисторами (Рис.6).
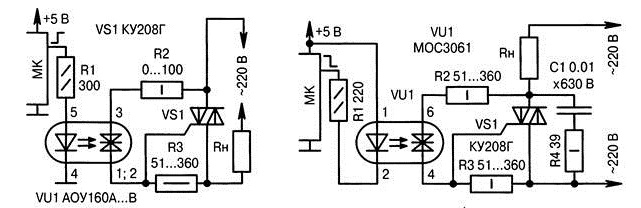
Рис.6
За счёт полной гальванической развязки управляющих цепей оптосимистора, основное его предназначение — это управление мощностью нагрузки при помощи логических устройств или микроконтроллеров с собственными цепями питания. 
Рис.7
В качестве примера на Рис.7 приведена схема регулятора мощности паяльника.
Вот, как работу этой схемы описывает уважаемый Falconist на странице сайта http://forum.cxem.net .
«Оптосимистор серии МОС204х/306х/308х содержит внутри себя схему пересечения питающим напряжением нуля, т.е. открывается только в точке нулевого значения синусоидального сетевого напряжения, независимо от момента поступления управляющего напряжения на его светодиод. Тем самым обеспечивается ключевой режим подключения нагрузки, с практически полным отсутствием ВЧ помех, проникающих в сеть 220 В. Поэтому его замена на оптосимисторы МОС302х/305х, не имеющих такой схемы, крайне нежелательна, т.к. порочит сам принцип беспомехового регулирования.
Конденсатор С1 является балластным реактивным сопротивлением. Ток, который он пропускает совместно с подключенным параллельно ему резистором R1,приближенно составляет 16 мА. Данный ток используется для питания таймера DA1 и инфракрасного светодиода оптрона DA2».
Работа таймера, формирующего управляющий сигнал для оптотиристора, аналогична работе DD1 на Рис.4 и сводится к формированию импульсов с изменяемой скважностью.
Принципы управления тиристорами и симисторами
Начнем с простейших схем. В простейшем случае, для управления тиристором достаточно кратковременно подать постоянный ток определенной величины на его управляющий электрод. Схематически механизм подачи этого тока можно показать, изобразив ключ, который замыкается и подает питание, подобно выходному каскаду микросхемы или транзистору.
Это простой с виду способ, однако мощность управляющего сигнала требуется здесь немалая. Так, в нормальных условиях для симистора КУ208 этот ток должен составлять минимум 160 мА, а для тринистора КУ201 — быть не менее 70 мА. Таким образом, для напряжения 12 вольт и при среднем токе, скажем, в 115 мА, мощность управления уже составит 1,4 Вт.

Требования к полярности управляющего сигнала таковы: тринистору требуется положительное относительно катода управляющее напряжение, а симистору (симметричному тиристору) — такое же по полярности, как в текущий момент на аноде, либо отрицательное для каждого из полупериодов.
Управляющий электрод симистора не шунтируют, тринистора — шунтируют резистором на 51 Ом. Современные тиристоры требуют все меньше управляющего тока, и очень часто можно встретить схемы, где ток управления тринисторами снижен до примерно 24 мА, а у симисторов — до 50 мА.
Может случиться так, что оголтелое снижение тока в цепи управления скажется на надежности работы прибора, поэтому тиристоры разработчикам порой приходится подбирать индивидуально для каждой схемы. В противном случае, для открытия тиристора малым током, напряжение на его аноде должно будет быть в этот момент велико, что приведет к вредному броску тока и к помехам.
Недостаток управления по описанной выше простейшей схеме — налицо: присутствует постоянная гальваническая связь цепи управления с силовой цепью. Симисторы в некоторых схемах допускают присоединение одного из выводов цепи управления — к нулевому проводу. Тринисторы же допускают такое решение лишь с добавлением к цепи нагрузки диодного моста.
В итоге мощность, подаваемая на нагрузку, снижается двукратно, поскольку напряжение к нагрузке подается лишь в один из периодов сетевой синусоиды. На практике имеем то, что схемы с управлением тиристорами постоянным током без гальванической развязки узлов почти не используются, за исключением случаев, где управление по какой-то веской причине необходимо реализовать именно так.
Распространенное решение для управления тиристором — когда на управляющий электрод напряжение подается прямо с анода через резистор путем замыкания ключа на несколько микросекунд. Ключом здесь может выступать высоковольтный биполярный транзистор, маленькое реле или фотосимистор.
Такой подход приемлем при относительно высоком напряжении на аноде, он удобен и прост, даже если нагрузка содержит реактивную составляющую. Но есть и недостаток: неоднозначные требования к токоограничительному резистору, который должен быть по номиналу небольшим, чтобы включение тиристора происходило ближе к началу полупериода синусоиды, однако при первом включении не при нулевом напряжении сети (в отсутствие синхронизации), на него может прийти и 310 вольт, а ведь ток через ключ и через управляющий электрод тиристора не должен превысить максимально допустимых для них величин.
Сам тиристор откроется ни напряжении Uоткр = Iоткр*Rогр. В итоге возникнут помехи, а напряжение на нагрузке немного уменьшится. Расчетное сопротивление резистора Rогр уменьшают на величину сопротивления цепи нагрузки (включая индуктивную ее составляющую), которая оказывается соединена последовательно с резистором в момент включения.
Но в случае с нагревательными приборами в расчет принимают тот факт, что в холодном состоянии их сопротивление десятикратно меньше чем в рабочем разогретом. Кстати, в силу того, что у симисторов ток включения по положительной и отрицательной полуволнам может чуть-чуть отличаться, на нагрузке может появиться небольшая постоянная составляющая.

Время включения тринисторов обычно составляет не более 10 мкс, поэтому для экономичного управления мощностью нагрузки можно подавать последовательность импульсов со скважностью 5, 10 или 20 для частот 20, 10 и 5 кГц соответственно. Мощность будет уменьшаться в от 5 до 20 раз.
Недостаток таков: тиристор может включиться и не в начале полупериода. Это чревато бросками тока и помехами. И еще, даже если включение происходит точно перед началом нарастания напряжения от нуля, в этот момент ток управляющего электрода может не достичь еще величины удержания, тогда тиристор выключится сразу по окончании импульса.
В итоге, тиристор будет сначала включаться и выключаться на короткие интервалы, пока наконец ток не примет синусоидальную форму. Для нагрузок с индуктивной составляющей ток может не достичь величины удержания, что накладывает ограничение снизу на длительность управляющих импульсов, и затраты мощности особо не снизятся.
Развязку управляющей схемы от сети обеспечивает так называемый импульсный запуск, который можно легко сделать прибегнув к установке маленького развязывающего трансформатора на ферритовом колечке диаметром менее 2 см. Важно, что напряжение изоляции такого трансформатора должно быть высоким, а не просто как в любом импульсном трансформаторе промышленного производства.
Чтобы действительно существенно понизить требуемую на управление мощность, придется прибегнуть к более точному управлению. Ток управляющего электрода необходимо выключать именно в момент включения тиристора. Когда ключ замыкается, тиристор включается, а когда тиристор начал проводить ток, микросхема прекращает подачу тока через управляющий электрод.
Такой подход действительно экономит энергию на управление тиристором. Если в момент замыкания ключа напряжение на аноде еще не достаточное, тиристор не будет открыт микросхемой (напряжение должно стать немного больше половины напряжения питания микросхемы). Напряжение включения регулируется подбором резисторов делителя.
Для управления подобным образом симистором, необходимо отслеживать и полярность, поэтому в схему добавляется блок из пары транзисторов и трех резисторов, фиксирующий момент прохождения напряжения через ноль. Более сложные схемы находятся за рамками данной статьи.
Регулятор мощности с фазовым управлением симистором на микроконтроллере PIC16F84A
 25.07.2011
25.07.2011  4 комментария
4 комментария
егулятор предназначен для плавного управления мощностью активнойнагрузки, питающейся от сети переменного тока 220 вольт частотой 50 Гц.Мощность нагрузки зависит от типа применяемого симистора. В основуметода управления положен принцип фазового регулирования моментавключения симистора, включенного последовательно с нагрузкой.
Фото регулятора представлены на риснках :

В момент включения мощность на нагрузке нарастает плавно, что удобно,если регулятор будет использоваться для регулирования яркости лампыосвещения. Вообще область применения регулятора самая широкая.
Основнымэлементом регулятора является микроконтроллер PIC16F84A.По входу RB0 микроконтроллера организовано прерывание в момент переходасетевого напряжения через ноль. Перепад на этом выводе формирует узелна оптопаре U1 (АОУ110Б). От момента прерывания программно организованазадержка включения симистора, которая меняется в определённых пределах.На светодиодном индикаторе это выглядит как регулирование мощности от 0до 99%.
Схема регулятора мощностипредставлена на рисунке :
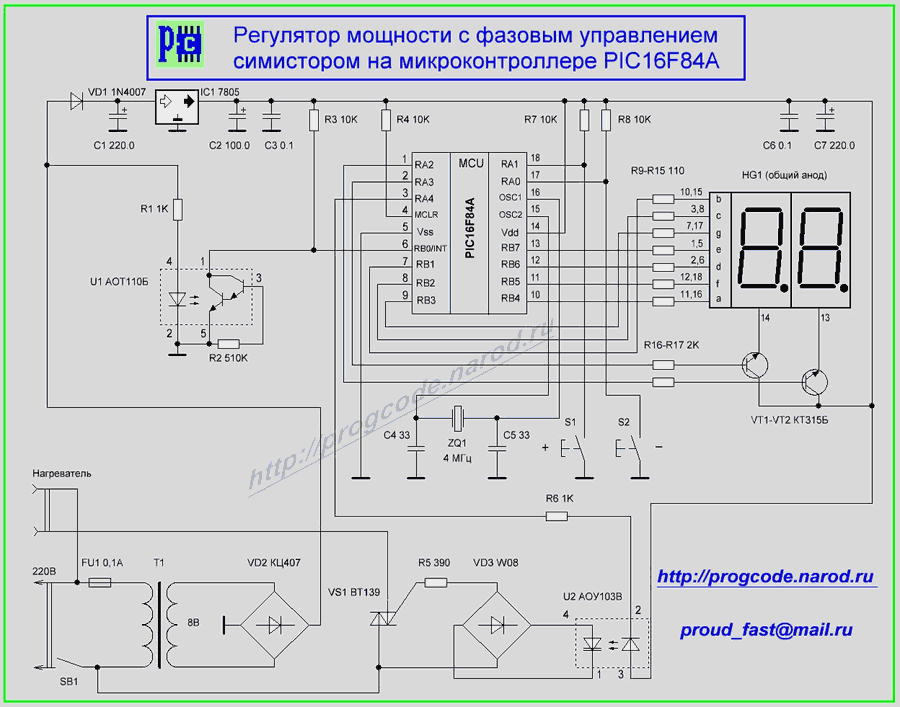
Погрешность соответствия показаний индикатора и действительной мощностиподводимой к нагрузке вполне достаточная для применения регулятора длябытовых целей. Кнопки S1 и S2 служат дляувеличения и уменьшения мощности соответственно. В подпрограмме опросакнопок организовано несколько режимов, удобных в пользовании, приоднократном нажатии изменение на единицу значения, при долгом нажатиибыстрое изменение и очень быстрое.
Узел управления симисторомсостоит из элементов U2, VD3, R5, стандартное схемное решение,оптотиристор U2 (АОУ103В) обеспечивает гальваническую развязку и спомощью диодного моста VD3 (W08) управление симистором VS1.
Схема питается от сети черезтрансформатор T1. Далее напряжение выпрямляется диодным мостом VD2,часть напряжения поступает на оптопару U1, для формированияперепада перехода сетевого напряжения через ноль, остальная часть черездиод VD1 на микросхему стабилизатора IC1, которая стабилизируетнапряжение до 5 вольт. Элементы С1, С2, С7 служат для сглаживанияпульсаций сетевого напряжения.
Прошивка для микроконтроллера PIC16F84A в HEX формате :PicPower.rar
Та-же прошивка в формате программы ProgCode : PicPower.sfr
Автор конструкции: Юрий Стрижаков
Связаться с автором можно по email (указан на схеме)
Управление симисторами в схемах на микроконтроллере
Симистор («триак» по терминологии, принятой в США) — это двунаправленный симметричный тиристор. Симисторы очень удобны для систем ключевого регулирования в цепях переменного тока. Как следствие, они практически вытеснили тиристоры из бытовой техники (стиральные машины, пылесосы и т.д.).
У симистора нет анода и катода. Его три вывода называются: УЭ (управляющий электрод), СЭУ (силовой электрод, расположенный ближе к УЭ), СЭ (силовой электрод у основания прибора) [2-197]. Существуют также аналогичные зарубежные названия, принятые в триаках, соответственно, «G» (Gate — затвор), «Т1» (Main Terminal 1) и «Т2» (Main Terminal 2).
Симистор, в зависимости от конструкции, может открываться как положительными, так и отрицательными импульсами на выводе УЭ. Ветви ВАХ симметричные, поэтому ток через силовые электроды может быть и втекающим, и вытекающим. Итого, различают четыре режима работы в квадрантах 1…4 (Рис. 2.105).

Рис. 2.105. Режимы работы симисторов (триаков).
Первыми были разработаны четырёх квадрантные симисторы или, по-другому, 4Q-TpnaKM. Они требуют для нормальной работы введения в схему демпферных ЛС-цепочек (100 Ом, 0.1 МК Ф), которые устанавливаются параллельно силовым электродам СЭУ и СЭ. Таким нехитрым способом снижается скорость нарастания напряжения через симистор и устраняются ложные срабатывания при повышенной температуре и значительной индуктивной или ёмкостной нагрузке.
Технологические достижения последнего времени позволили создать трёхквадрантные симисторы или, по-другому, 3Q триаки. Они, в отличие от симисторов «4Q», работают в трёх из четырёх квадрантов и не требуют ЯС-цепочек. Типовые параметры 3Q-TpnaKOB Hi-Com BTA208…225 фирмы Philips: максимальное коммутируемое напряжение 600…800 В, ток силовой части 8…25 А, ток отпирания затвора (УЭ) 2…50 мА, малогабаритный SMD-корпус.
Схемы подключения симисторов к MK можно условно разделить на две группы: без развязки от сети 220 В (Рис. 2.106, a…r) и с гальванической изоляцией (Рис. 2.107, а…л).
Некоторые замечания. Типы указанных на схемах симисторов однообразны, в основном КУ208х, BTxxx, MACxxx. Это сделано специально, чтобы заострить внимание на схемотехнике низковольтной управляющей части, поскольку она ближе всего к MK. На практике можно использовать и другие типы симисторов, следя за их выходной мощностью и амплитудой управляющего тока.
Демпферные цепочки в силовой части на схемах, как правило, отсутствуют. Это упрощение, чтобы не загромождать рисунки, поскольку предполагается, что сопротивление нагрузки RH носит чисто активный характер. В реальной жизни демпфирование необходимо для 4Q-триаков, если нагрузка имеет значительную индуктивную или ёмкостную составляющую.

Рис. 2.106. Схемы подключения симисторов к MK без гальванической изоляции (начало):
а) ВЫСОКИЙ уровень на выходе МК открывает транзистор VT1, через который включается симистор VS1. Варистор RU1 защищает симистор от всплесков напряжения, начиная с порога 470 В (разброс 423…517 В). Это актуально при индуктивном характере нагрузки jRH;
б) аналогично Рис. 2.106, а, но с другой полярностью сигнала на выходе MK и с транзистором VT1 другой структуры, который выполняет функцию инвертора напряжения. Благодаря низкому сопротивлению резистора R2, повышается помехоусточивость. Сопротивление резистора R2 выбирается по тем же критериям, что и для схем на тиристорах;

Рис. 2.106. Схемы подключения симисторов к MK без гальванической изоляции (окончание):
в) высоковольтный транзистор ГУ2замыкаетдиагональдиодного моста VD1 при НИЗКОМ уровне на линии MK. Транзистор VT1 в момент рестарта MK находится в открытом состоянии из-за резистора R1, при этом симистор VS1 закрывается и ток через нагрузку RH не протекает;
г) прямое управление симистором VS1 с одного или нескольких выходов MK. Запараллеливание линий применяется при недостаточном токе управления (показано пунктиром). Ток через нагрузку RH не более 150 мА. Возможные замены: VS1 — MAC97A8, VD2— KC147A.

а) симистор VS1 включается/выключается при наличии/отсутствии импульсов 50…100 кГц, генерируемых с выхода MK. Изолирующий трансформатор T1 наматывается на кольце из феррита N30 и содержит в обмотке I — 15 витков, в обмотке II — 45 витков провода ПЭВ-0.2;
б) простая схема трансформаторной развязки. Симистор VS1 включается короткими импульсами с выхода MK. Ток управления зависит от коэффициента трансформации 77;

Рис. 2.107. Схемы гальванической изоляции МК от симисторов (продолжение):
в) разделительный трансформатор T1 наматывается на ферритовом кольце M1000HM размерами K20xl2x6 и содержит в обмотке I — 60 витков, в обмотке II — 120 витков провода ПЭВ-0.2. Цепочка R3, C1 накапливает энергию для импульсной коммутации транзистора K77;
г) если не требуется частое включение/выключение нагрузки, то для гальванической развязки можно использовать реле K1. Его контакты должны выдерживать без пробоя переменное напряжение 220 В. В некоторых схемах токоограничивающий резистор R3 закорачивают;
д) контакты геркона SF1 замыкаются при протекании тока через катушку индуктивности L1, которая намотана на его корпус. Достоинство — сверхбольшое сопротивление изоляции;
е) гальваническая развязка на транзисторной оптопаре VU1. Резистор R3 повышает помехоустойчивость, но может отсутствовать. Резистор Я2определяет порог открывания транзистора VT1. При использовании симисторов КУ208, TC106-10 сопротивление резистора Я2уменьшают до 30…75 кОм;

ж) симистором VS1 управляет драйвер DA1 (по-старому, КР1182ПМ1), который обеспечивает плавное изменение тока в нагрузке RH в зависимости от напряжения на конденсаторе C1. Если транзистор оптопары W/закрыт, то конденсатор С1 заряжается от внутреннего ИОН микросхемы DA1 и в нагрузке устанавливается максимальное напряжение. Резистор R4 может отсутствовать при наличии резистора R3. Резистор R3 можно закоротить при наличии резистора R4
з) гальваническая развязка на опторезисторе VU1. Резистором R1 подбирается ток через своизлучатель VU1 и, соответственно, ток управления симистором VS1;
и) применение двух оптотиристоров VU1, УУ2щя коммутации симистора VS1 в любой пупериод сетевого напряжения. Резистор Л2ограничивает ток управления симистора;
к) питание входа УЭ симистора VS1 осуществляется от отдельной низковольтной обмотки промышленного трансформатора T1ТПП235-220/110-50;
л) применение оптотиристора VU1 для управления симистором VS1 (замена КУ208Д1). Из двух токоограничивающих резисторов R2, R3 обычно оставляют один, второй замыкают перемычкой. Замена VD1 — мост КЦ407А или четыре отдельных диода КД226.
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).
Способы и схемы управления тиристором или симистором
Тиристоры нашли широкое применение в полупроводниковых устройствах и преобразователях. Различные источники питания, частотные преобразователи, регуляторы, возбудительные устройства для синхронных двигателей и много других устройств строились на тиристорах, а в последнее время их вытесняют преобразователи на транзисторах. Основной задачей для тиристора является включение нагрузки в момент подачи управляющего сигнала. В этой статье мы рассмотрим, как управлять тиристорами и симисторами.

Определение
Тиристор (тринистор) — это полупроводниковый полууправляемый ключ. Полууправляемый — значит, что вы можете только включать тиристор, отключается он только при прерывании тока в цепи или если приложить к нему обратное напряжение.
Он, подобно диоду, проводит ток только в одном направлении. То есть для включения в цепь переменного тока для управления двумя полуволнами нужно два тиристора, для каждой по одному, хотя не всегда. Тиристор состоит из 4 областей полупроводника (p-n-p-n).
Другой подобный прибор называется симистор — двунаправленный тиристор. Его основным отличием является то, что ток он может проводить в обе стороны. Фактически он представляет собой два тиристора соединённых параллельно навстречу друг другу.
Основные характеристики
Как и любых других электронных компонентов у тиристоров есть ряд характеристик:
Падение напряжения при максимальном токе анода (VT или Uос).
Прямое напряжение в закрытом состоянии (VD(RM) или Uзс).
Обратное напряжение (VR(PM) или Uобр).
Прямой ток (IT или Iпр) – это максимальный ток в открытом состоянии.
Максимально допустимый прямой ток (ITSM) — это максимальный пиковый ток в открытом состоянии.
Обратный ток (IR) — ток при определенном обратном напряжении.
Постоянный ток в закрытом состоянии при определенном прямом напряжении (ID или Iзс).
Постоянное отпирающее напряжение управления (VGT или UУ).
Ток управления (IGT).
Максимальный ток управления электрода IGM.
Максимально допустимая рассеиваемая мощность на управляющем электроде (PG или Pу)
Принцип работы
Когда на тиристор подают напряжение он не проводит ток. Есть два способа включит его – подать напряжение между анодом и катодом достаточное для открытия, тогда его работа ничем не будет отличаться от динистора.
Другой способ – это подать кратковременный импульс на управляющий электрод. Ток открытия тиристора лежит в пределах 70-160 мА, хотя на практике эта величина, как и напряжение которое нужно приложить к тиристору зависит от конкретной модели и экземпляра полупроводникового прибора и даже от условий, в которых он работает, таких, например, как температура окружающей среды.
Кроме управляющего тока, есть такой параметр как ток удержания — это минимальный ток анода для удержания тиристора в открытом состоянии.
После открытия тиристора управляющий сигнал можно отключать, тиристор будет открыт до тех пор, пока через него протекает прямой ток и подано напряжение. То есть в цепи переменного тиристор будет открыт в течении той полуволны напряжение которой смещает тиристор в прямом направлении. Когда напряжение устремится к нулю, снизится и ток. Когда ток в цепи упадет ниже величины тока удержания тиристора — он закроется (выключится).
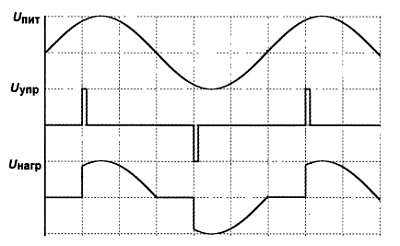
Полярность управляющего напряжения должна совпадать с полярностью напряжения между анодом и катодом, что вы наблюдаете на осциллограммах выше.
Управление симистором аналогично хоть и имеет некоторые особенности. Для управления симистором в цепи переменного тока нужно два импульса управляющего напряжения — на каждую полуволну синусоиды соответственно.
После подачи управляющего импульса в первой полуволне (условно положительной) синусоидального напряжения ток через симистор будет протекать до начала второй полуволны, после чего он закроется, как и обычный тиристор. После этого нужно подать еще один управляющий импульс для открытия симистора на отрицательной полуволне. Это наглядно проиллюстрировано на следующих осциллограммах.
Полярность управляющего напряжения должна соответствовать полярности приложенного напряжения между анодом и катодом. Из-за этого возникают проблемы при управлении симисторами с помощью цифровых логических схем или от выходов микроконтроллера. Но это легко решается путем установки симисторного драйвера, о чем мы поговорим позже.
Распространенные схемы управления тиристорами или симисторами
Самой распространенной схемой является симисторный или тиристорный регулятор.
Здесь тиристор открывается после того как на конденсаторе будет достаточная величина для его открытия. Момент открытия регулируется с помощью потенциометра или переменного резистора. Чем больше его сопротивление — тем медленнее заряжается конденсатор. Резистор R2 ограничивает ток через управляющий электрод.
Эта схема регулирует оба полупериода, то есть вы получаете полную регулировку мощности почти от 0% и почти до 100%. Это удалось достичь, установив регулятор в диодном мосте, таким образом регулируется одна из полуволн.
Упрощенная схема изображена ниже, здесь регулируется лишь половина периода, вторая полуволна проходит без изменения через диод VD1. Принцип работы аналогичен.
Симисторный регулятор без диодного моста позволяет управлять двумя полуволнами.
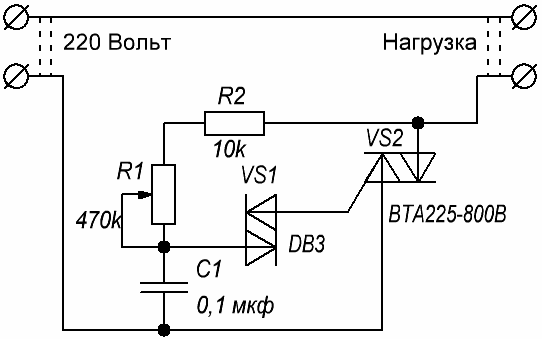
По принципу действия почти аналогична предыдущим, но построена на симисторе с её помощью регулируются уже обе полуволны. Отличия заключаются в том, что здесь импульс управления подаётся с помощью двунаправленного динистора DB3, после того как конденсатор зарядится до нужного напряжения, обычно это 28-36 Вольт. Скорость зарядки также регулируется переменным резистором или потенциометром. Такая схема реализована в большинстве бытовых диммеров.

Такие схемы регулировки напряжения называется СИФУ — система импульсного фазового управления.
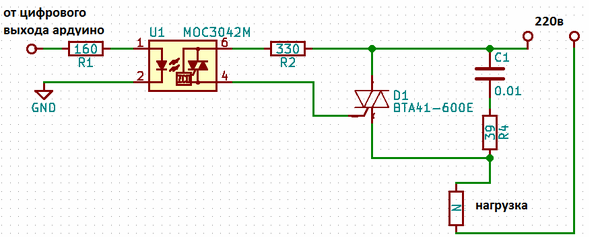
На рисунке выше изображен вариант управления симистором с помощью микроконтроллера, на примере популярной платформы Arduino. Симисторный драйвер состоит из оптосимистора и светодиода. Так как в выходной цепи драйвера установлен оптосимистор на управляющий электрод всегда подаётся напряжение нужной полярности, но здесь есть некоторые нюансы.
Дело в том, что для регулировки напряжения с помощью симистора или тиристора нужно подавать управляющий сигнал в определенный момент времени, так чтобы срез фазы происходил до нужной величины. Если наугад стрелять управляющими импульсами — схема работать конечно будет, но регулировок добиться не выйдет, поэтому нужно определять момент перехода полуволны через ноль.
Так как для нас не имеет значения полярность полуволны в настоящий момент времени — достаточно просто отслеживать момент перехода через ноль. Такой узел в схеме называют детектор нуля или нуль-детектор, а в англоязычных источниках «zero crossing detector circuit» или ZCD. Вариант такой схемы с детектором перехода через ноль на транзисторной оптопаре выглядит следующим образом:
Оптодрайверов для управления симисторами есть множество, типовые – это линейка MOC304x, MOC305x, MOC306X, произведенные компанией Motorola и другими. Более того – эти драйверы обеспечивают гальваническую развязку, что убережет ваш микроконтроллер в случае пробоя полупроводникового ключа, что вполне возможно и вероятно. Также это повысит безопасность работы с цепями управления, полностью разделив цепь на «силовую» и «оперативную».
Заключение
Мы рассказали базовые сведения о тиристорах и симисторах, а также управлении ими в цепях с «переменкой». Стоит отметить, что мы не затрагивали тему запираемых тиристоров, если вас интересует этот вопрос – пишите комментарии и мы рассмотрим их подробнее. Также не были рассмотрены нюансы использования и управления тиристорами в силовых индуктивных цепях. Для управления «постоянкой» лучше использовать транзисторы, поскольку в этом случае вы решаете, когда ключ откроется, а когда он закроется, повинуясь управляющему сигналу…
Симисторы: принцип работы, проверка и включение, схемы
Существенный недостаток тиристоров заключается в том, что это однополупериодные элементы, соответственно, в цепях переменного тока они работают с половинной мощностью. Избавиться от этого недостатка можно используя схему встречно-параллельного включения двух однотипных устройств или установив симистор. Давайте разберемся, что представляет собой этот полупроводниковый элемент, принцип его функционирования, особенности, а также сферу применения и способы проверки.
Что такое симистор?
Это один из видов тиристоров, отличающийся от базового типа большим числом p-n переходов, и как следствие этого, принципом работы (он будет описан ниже). Характерно, что в элементной базе некоторых стран данный тип считается самостоятельным полупроводниковым устройством. Эта незначительная путаница возникла вследствие регистрации двух патентов, на одно и то же изобретение.
Описание принципа работы и устройства
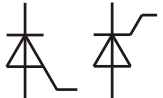
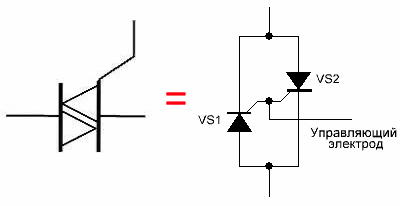
Основное отличие этих элементов от тиристоров заключается в двунаправленной проводимости электротока. По сути это два тринистора с общим управлением, включенных встречно-параллельно (см. А на рис. 1) .
 Рис. 1. Схема на двух тиристорах, как эквивалент симистора, и его условно графическое обозначение
Рис. 1. Схема на двух тиристорах, как эквивалент симистора, и его условно графическое обозначение
Это и дало название полупроводниковому прибору, как производную от словосочетания «симметричные тиристоры» и отразилось на его УГО. Обратим внимание на обозначения выводов, поскольку ток может проводиться в оба направления, обозначение силовых выводов как Анод и Катод не имеет смысла, потому их принято обозначать, как «Т1» и «Т2» (возможны варианты ТЕ1 и ТЕ2 или А1 и А2). Управляющий электрод, как правило, обозначается «G» (от английского gate).
Теперь рассмотрим структуру полупроводника (см. рис. 2.) Как видно из схемы, в устройстве имеется пять переходов, что позволяет организовать две структуры: р1-n2-p2-n3 и р2-n2-p1-n1, которые, по сути, являются двумя встречными тринисторами, подключенными параллельно.
 Рис. 2. Структурная схема симистора
Рис. 2. Структурная схема симистора
Когда на силовом выводе Т1 образуется отрицательная полярность, начинается проявление тринисторного эффекта в р2-n2-p1-n1, а при ее смене — р1-n2-p2-n3.
Заканчивая раздел о принципе работы приведем ВАХ и основные характеристики прибора.
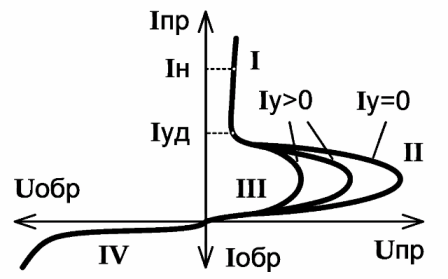
 ВАХ симистора
ВАХ симистора
Обозначение:
- А – закрытое состояние.
- В – открытое состояние.
- UDRM (UПР) – максимально допустимый уровень напряжения при прямом включении.
- URRM (UОБ) – максимальный уровень обратного напряжения.
- IDRM (IПР) – допустимый уровень тока прямого включения
- IRRM (IОБ) — допустимый уровень тока обратного включения.
- IН (IУД) – значения тока удержания.
Особенности
Чтобы иметь полное представление о симметричных тринисторах, необходимо рассказать про их сильные и слабые стороны. К первым можно отнести следующие факторы:
- относительно невысокая стоимость приборов;
- длительный срок эксплуатации;
- отсутствие механики (то есть подвижных контактов, которые являются источниками помех).
В число недостатков приборов входят следующие особенности:
- Необходимость отвода тепла, примерно из расчета 1-1,5 Вт на 1 А, например, при токе 15 А величина мощности рассеивания будет около 10-22 Вт, что потребует соответствующего радиатора. Для удобства крепления к нему у мощных устройств один из выводов имеет резьбу под гайку.
 Симистор с креплением под радиатор
Симистор с креплением под радиатор
- Устройства подвержены влиянию переходных процессов, шумов и помех;
- Не поддерживаются высокие частоты переключения.
По последним двум пунктам необходимо дать небольшое пояснение. В случае высокой скорости коммутации велика вероятность самопроизвольной активации устройства. Помеха в виде броска напряжения также может привести к этому результату. В качестве защиты от помех рекомендуется шунтировать прибор RC цепью.
 RC-цепочка для защиты симистора от помех
RC-цепочка для защиты симистора от помех
Помимо этого рекомендуется минимизировать длину проводов ведущих к управляемому выводу, или в качестве альтернативы использовать экранированные проводники. Также практикуется установка шунтирующего резистора между выводом T1 (TE1 или A1) и управляющим электродом.
Применение
Этот тип полупроводниковых элементов первоначально предназначался для применения в производственной сфере, например, для управления электродвигателями станков или других устройств, где требуется плавная регулировка тока. Впоследствии, когда техническая база позволила существенно уменьшить размеры полупроводников, сфера применения симметричных тринисторов существенно расширилась. Сегодня эти устройства используются не только в промышленном оборудовании, а и во многих бытовых приборах, например:
- зарядные устройства для автомобильных АКБ;
- бытовое компрессорное оборудования;
- различные виды электронагревательных устройств, начиная от электродуховок и заканчивая микроволновками;
- ручные электрические инструменты (шуроповерт, перфоратор и т.д.).
И это далеко не полный перечень.
Одно время были популярны простые электронные устройства, позволяющие плавно регулировать уровень освещения. К сожалению, диммеры на симметричных тринисторах не могут управлять энергосберегающими и светодиодными лампами, поэтому эти приборы сейчас не актуальны.
Как проверить работоспособность симистора?
В сети можно найти несколько способ, где описан процесс проверки при помощи мультиметра, те, кто описывал их, судя по всему, сами не пробовали ни один из вариантов. Чтобы не вводить в заблуждение, следует сразу заметить, что выполнить тестирование мультиметром не удастся, поскольку не хватит тока для открытия симметричного тринистора. Поэтому, у нас остается два варианта:
- Использовать стрелочный омметр или тестер (их силы тока будет достаточно для срабатывания).
- Собрать специальную схему.
Алгоритм проверки омметром:
- Подключаем щупы прибора к выводам T1 и T2 (A1 и A2).
- Устанавливаем кратность на омметре х1.
- Проводим измерение, положительным результатом будет бесконечное сопротивление, в противном случае деталь «пробита» и от нее можно избавиться.
- Продолжаем тестирование, для этого кратковременно соединяем выводы T2 и G (управляющий). Сопротивление должно упасть примерно до 20-80 Ом.
- Меняем полярность и повторяем тест с пункта 3 по 4.
Если в ходе проверки результат будет таким же, как описано в алгоритме, то с большой вероятностью можно констатировать, что устройство работоспособное.
Заметим, что проверяемую деталь не обязательно демонтировать, достаточно только отключить управляющий вывод (естественно, обесточив предварительно оборудование, где установлена деталь, вызывающая сомнение).
Необходимо заметить, что данным способом не всегда удается достоверно проверку, за исключением тестирования на «пробой», поэтому перейдем ко второму варианту и предложим две схемы для тестирования симметричных тринисторов.
Схему с лампочкой и батарейкой мы приводить не будем в виду того, что таких схем достаточно в сети, если вам интересен этот вариант, можете посмотреть его в публикации о тестировании тринисторов. Приведем пример более действенного устройства.
 Схема простого тестера для симисторов
Схема простого тестера для симисторов
Обозначения:
- Резистор R1 – 51 Ом.
- Конденсаторы C1 и С2 – 1000 мкФ х 16 В.
- Диоды – 1N4007 или аналог, допускается установка диодного моста, например КЦ405.
- Лампочка HL – 12 В, 0,5А.
Можно использовать любой трансформатор с двумя независимыми вторичными обмотками на 12 Вольт.
Алгоритм проверки:
- Устанавливаем переключатели в исходное положение (соответствующее схеме).
- Производим нажатие на SB1, тестируемое устройство открывается, о чем сигнализирует лампочка.
- Жмем SB2, лампа гаснет (устройство закрылось).
- Меняем режим переключателя SA1 и повторяем нажатие на SB1, лампа снова должна зажечься.
- Производим переключение SA2, нажимаем SB1, затем снова меня ем положение SA2 и повторно жмем SB1. Индикатор включится, когда на затвор попадет минус.
Теперь рассмотрим еще одну схему, только универсальную, но также не особо сложную.
 Схема для проверки тиристоров и симисторов
Схема для проверки тиристоров и симисторов
Обозначения:
- Резисторы: R1, R2 и R4 – 470 Ом; R3 и R5 – 1 кОм.
- Емкости: С1 и С2 – 100 мкФ х 10 В.
- Диоды: VD1, VD2, VD5 и VD6 – 2N4148; VD2 и VD3 – АЛ307.
В качестве источника питания используется батарейка на 9V, по типу Кроны.
Тестирование тринисторов производится следующим образом:
- Переключатель S3, переводится в положении, как продемонстрировано на схеме (см. рис. 6).
- Кратковременно производим нажатие на кнопку S2, тестируемый элемент откроется, о чем просигнализирует светодиод VD
- Меняем полярность, устанавливая переключатель S3 в среднее положение (отключается питание и гаснет светодиод), потом в нижнее.
- Кратковременно жмем S2, светодиоды не должны загораться.
Если результат будет соответствовать вышеописанному, значит с тестируемым элементом все в порядке.
Теперь рассмотрим, как проверить с помощью собранной схемы симметричные тринисторы:
- Выполняем пункты 1-4.
- Нажимаем кнопку S1- загорается светодиод VD
То есть, при нажатии кнопок S1 или S2 будут загораться светодиоды VD1 или VD4, в зависимости от установленной полярности (положения переключателя S3).
Схема управления мощностью паяльника
В завершении приведем простую схему, позволяющую управлять мощностью паяльника.
 Простой регулятор мощности для паяльника
Простой регулятор мощности для паяльника
Обозначения:
- Резисторы: R1 – 100 Ом, R2 – 3,3 кОм, R3 – 20 кОм, R4 – 1 Мом.
- Емкости: С1 – 0,1 мкФ х 400В, С2 и С3 — 0,05 мкФ.
- Симметричный тринистор BTA41-600.
Приведенная схема настолько простая, что не требует настройки.
Теперь рассмотрим более изящный вариант управления мощностью паяльника.
 Схема управления мощностью на базе фазового регулятора
Схема управления мощностью на базе фазового регулятора
Обозначения:
- Резисторы: R1 – 680 Ом, R2 – 1,4 кОм, R3 — 1,2 кОм, R4 и R5 – 20 кОм (сдвоенное переменное сопротивление).
- Емкости: С1 и С2 – 1 мкФ х 16 В.
- Симметричный тринистор: VS1 – ВТ136.
- Микросхема фазового регулятора DA1 – KP1182 ПМ1.
Настройка схемы сводится к подбору следующих сопротивлений:
- R2 – с его помощью устанавливаем необходимую для работы минимальную температуру паяльника.
- R3 – номинал резистора позволяет задать температуру паяльника, когда он находится на подставке (срабатывает переключатель SA1),
Управление симисторами в схемах на микроконтроллере
О. ХОВАЙКО, г. Москва
Журнал Радио 1998 год, номер 2
Для управления электродвигателем, лампой накаливания или иной мощной нагрузкой в составе устройств, гальванически связанных с электросетью, обычно используют симистор. При этом разработчикам приходится идти на разные схемотехнические ухищрения — вводить в узлы управления симистором специальные генераторы, трансформаторную, оптронную или релейную развязки и т. п. В результате такие узлы становятся лишними, так как функция развязки в устройствах, гальванически связанных с электросетью, в общем-то не нужна.
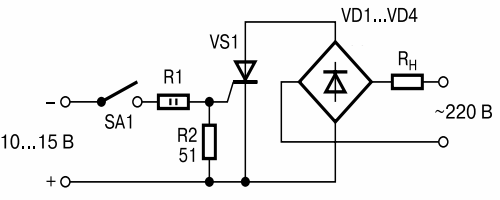
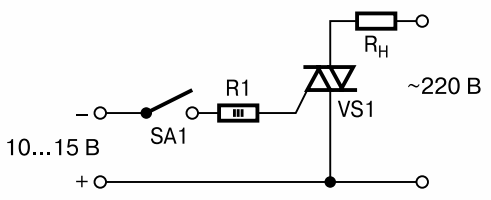
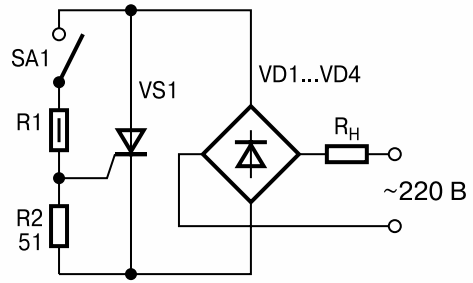
Предлагаю простой узел управления симистором (рис. 1), обеспечивающий включение/выключение в сеть переменного тока промышленной частоты (без фазового регулирования) нагрузки мощностью до 1,4 кВт. При отсутствии тока во входной цепи нагрузка Rн отключена, а при пропускании тока значением 1 . 15 мА нагрузка подключается к сети и остается в таком состоянии до тех пор, пока не прекратится управляющий ток.

Рассмотрим работу узла подробнее. При отсутствии тока во входной цепи (вход узла заземлен, оставлен свободным или на него не подано никакого напряжения) тринистор VS1 закрыт, конденсатор С1 заряжен через диод VD1 до амплитудного значения напряжения сети. В это время ток через управляющий электрод симистора VS2 не идет, так как для прохождения переменного тока управляющего электрода симистора конденсатор С1 должен перезаряжаться, а цепь его разрядки отсутствует. При возникновении входного тока тринистор VS1 открывается и тем самым создает цепь разрядки для конденсатора С1, что вызывает прохождение переменного тока через управляющий электрод симистора VS2 и открывание его. Но ток через управляющий электрод симистора опережает напряжение сети на угол, близкий к 90° (максимум тока сразу после перехода напряжения сети через «нуль»), что обеспечивает управляющему электроду режим, близкий к оптимальному.
Резисторы R1, R3 и R4 предназначены для шунтирования токов утечки, а резистор R2 — для ограничения броска тока при включении тринистора VS1 и оптимизации фазового сдвига при работе. Вместо резистора R3 можно включить миниатюрную лампу накаливания на ток накала около 50 мА, например, коммутаторную КМ60-55 — она будет выполнять функцию индикатора работы цепи нагрузки.
Схема узла управления трехфазной нагрузкой показана на рис. 2.

Тринистор VS1 является общим для всех трех плеч узла управления симисторами VS2-VS4. Диоды VD1-VD3 предотвращают протекание сквозного тока через соединенные звездой конденсаторы С1-СЗ. Нагрузку к такому узлу можно подключать как звездой, так и треугольником. Максимальная же мощность каждой нагрузки определяется предельным током используемых симисторов.
Первое из описанных здесь устройств в течение шести месяцев безотказно работало в составе автоматической водокачки, управляя насосом «Кама» мощностью 400 Вт.
От редакции журнала Радио. При выборе элементов устройства следует иметь в виду, что к си-мистору VS1 и диоду VD1 прикладывается двойное амплитудное напряжетю сети (т. е. более 600 В), что недопустимо для ука-занпых типов приборов. Для надежной ра-боты устройства необходимо выбрать элементы с соответствующим рабочим напряжением.
Управление симисторами в схемах на микроконтроллере
В статье рассматривается вариант замены механического термостата на электронный регулятор на новом микроконтроллере от Microchip — PIC10F204. Управление током через нагревательный элемент осуществляется с помощью симистора, основы управления которым также рассмотрены в статье.
В большей части нагревательных приборов и электроплит применяются механические термостаты — устройства, обеспечивающие периодическое включение нагревательного элемента. Механический термостат является дешевым решением, но он имеет ряд существенных недостатков:
- возможность калибровки прибора только на этапе производства;
- плохая работа при низком уровне регулирования;
- низкая точность регулирования;
- большое количество механических деталей.
В этой статье рассматривается вариант замены механического термостата на электронный регулятор на микроконтроллере PIC10F204— новинке от Microchip в 6-выводном корпусе SOT-23. Управление током через нагревательный элемент осуществляется с помощью симистора, основы управления которым также рассмотрены в статье. Для питания микроконтроллера используется бестрансформаторный источник питания.
Электронный термостат, разработанный на Flash-микроконтроллере, может иметь ряд удобных функций: светодиодный индикатор состояния, автоматическое отключение питания и т. д.
В электроплитах и нагревателях используется резистивный нагревательный элемент. Для управления нагревом используется механический термостат, который может подавать напряжение на нагревательный элемент в течение заданного времени. Он работает следующим образом:
- Электрический контакт образуется между двумя проводниками. Для их размыкания используется биметаллическая пластина.
- Коммутируемый ток протекает через биметаллическую пластину, вызывая ее нагрев.
- При определенной температуре пластина изгибается и соединение размыкается.
- После размыкания происходит охлаждение пластины и цикл повторяется.
Для управления частотой повторения используется специальный винт, с помощью которого изменяется предварительная сила сжатия контактов. Обычно на головке винта имеется ручка для выставления температуры или мощности. Ясно, что такая уставка не может быть точной. Кроме того, в процессе работы изнашиваются как сами контакты (обгорают), так и биметаллическая пластина в следствие постоянного температурного расширения-сжатия. Все это очень сильно сказывается на долговечности металлических термостатов.
Принцип работы симистора
Симистор — полупроводниковый элемент, предназначенный для коммутации нагрузки в сети переменного тока. Он имеет три вывода: два силовых и управляющий. Для управления режимом работы симистора используется низковольтный сигнал, подаваемый на управляющий электрод симистора. При подаче напряжения на управляющий электрод симистор переходит из закрытого состояния в открытое и пропускает через себя ток. Все режимы работы симистора отображены на рис. 1. Каждый квадрант соответствует определенному режиму работы симистора. Все уровни даны относительно точки МТ1.
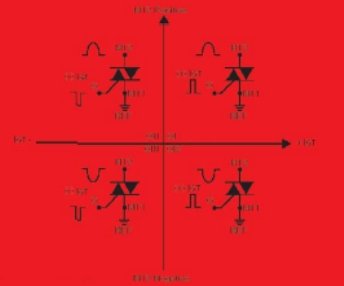
Рис. 1. Режимы работы симистора
Рабочими квадрантами являются QI, QII и QIII, запрещенный — QIV. В этом квадранте симистор может выйти из строя, для предотвращения этого состояния используются специальные схемы защиты. Другим вариантом является работа только при негативных уровнях управляющего напряжения — в квадрантах QII и QIII.
Следует заметить, что в настоящее время многие производители полупроводниковых приборов освоили производство трехквадрантных симисторов, у которых случайный переход в квадрант QIV невозможен. В связи с тем, что симистор управляется не напряжением, а током, возможно его подключение непосредственно к выводу микроконтроллера, ток через который может быть до 25 мА. Симистор остается в открытом состоянии до окончания полупериода коммутируемого напряжения. При переходе через нуль симистор закрывается — он оказывается в другом квадранте, и для его открытия требуется следующий управляющий импульс.
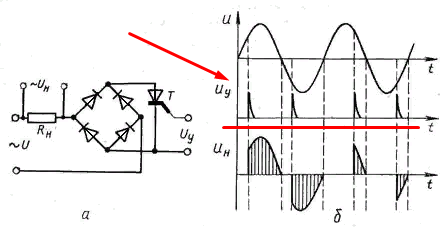
Для изменения мощности, подведенной к нагрузке через симистор, может использоваться фазовое управление (рис. 2). Сущность метода заключается в пропуске части полупериода сетевого напряжения — аналогично широтно-импульсной модуляции. Ток в нагрузке пропорционален интегралу от полученного сигнала. Такой режим используется в регуляторах освещенности — диммерах. Яркость свечения лампы накаливания пропорциональна площади под обрезанной синусоидой.
Рис. 2. Фазовое управление
Преимуществом этого метода является то, что частота пульсаций на нагрузке остается равной сетевой. Это важно для управления осветительными приборами, так как снижение частоты может сказаться на появлении мерцания, заметного глазом.
Обратной стороной являются наводки, которые могут появиться в связи с резким переключением симистора. Эти наводки плохо сказываются на электромагнитной совместимости (EMI) полученного устройства и могут вызвать ненужные переключения симистора.
Альтернативным методом управления мощностью является метод пропуска периодов.
Для регулирования тока через нагрузку симистор пропускает только часть периодов сетевого напряжения. Пропуск периодов позволяет решить проблему электромагнитной совместимости, так как включение симистора происходит в момент перехода сетевого напряжения через нуль.
Режим пропуска периодов применим для управления резистивными нагрузками, но не применим для осветительных приборов, так как вызывает мигание ламп накаливания.
Для обоих методов управления мощностью необходимо знать, когда сетевое напряжение переходит через нуль. Одним из способов является подача переменного сетевого напряжения непосредственно на вход микроконтроллера через последовательный резистор в несколько МОм. Благодаря наличию защитных диодов на портах микроконтроллеров Microchip PIC напряжение будет ограничено: сверхунапряжением питания, снизу — уровнем GND.
Существует и альтернативный способ, который используется в данной реализации.
Рассмотрим схему реализации блока управления нагрузкой на микроконтроллере Microchip PIC10F204, имеющем встроенный аналоговый компаратор (рис. 3). Для питания микроконтроллера используется бестрансформаторный резистивный источник питания.
Рис. 3. Принципиальная схема устройства
Более подробно о расчетах таких источников можно узнать из статьи «AN954 Transformerless power supplies: resistive and capacitive» на сайте компании. Для детектирования момента перехода сетевого напряжения через нуль достаточно использовать сигнал, снятый с анода стабилитрона. Сигнал подается через токоограничительный резистор непосредственно на вывод порта микроконтроллера.
Схема управления током через нагрузку не содержит обратной связи, для установки мощности используется переменный резистор, то есть получен электронный аналог термостата. В качестве нагрузки используется резистивный нагреватель. При сетевом питании 220 В получаем действующее значение тока порядка 5 А, однако симистор необходимо выбрать с запасом рабочего тока и установить на теплоотвод. В схеме используется BTA208-600F фирмы Philips.
Для оцифровки значения переменного резистора, устанавливающего мощность, используется интегрирующий преобразователь на конденсаторе С6. Для стабилизации задающего напряжения применен стабилитрон D4 на 3 В. В начале цикла преобразования вывод контроллера GP1 настраивается на выход и выдается высокий уровень. Этим уровнем заряжается конденсатор. Далее вывод конфигурируется как вход компаратора, конденсатор начинает разряжаться через переменный резистор (время разряда пропорционально значению резистора). Значение на выводе сравнивается с внутренним опорным напряжением 0,6 В. В момент, когда напряжение на конденсаторе упадет ниже этого уровня, срабатывает компаратор, и фиксируется время разряда.
По формуле можно рассчитать значение переменного резистора:
где t — время разряда конденсатора, RPOT1 — сопротивление переменного резистора, VREF — внутреннее опорное напряжение (0,6 В), VZ — напряжение на стабилитроне (3 В).
В устройстве используется переменный резистор 25 кОм с линейной зависимостью сопротивления от угла поворота. Время разряда лежит в пределах от 3,53 до 7,56 мс, время полного разряда должно быть меньше 10 мс, так как используется синхронизация с сетью.
Диаграмма работы преобразователя представлена на рис. 4.
Рис. 4. Преобразование значения переменного резистора
Борьба с шумами
Представленная на рис. 3 схема цифрового термостата предполагает наличие идеального сетевого питания. В реальной сети имеются достаточно сильные помехи, которые могут сказаться на функционировании микроконтроллера. Особенно опасны шумы мегагерцового диапазона, амплитуда которых может достигать десятков киловольт. Если при разработке схемы учесть этот факт и принять ряд несложных мер, то это сэкономит много сил и времени при отладке. Создание надежного сетевого устройства предполагает изолирование микроконтроллера от высокочастотных шумов. Это относится не только к цепям питания, но и к остальным выводам контроллера. На рис. 5 представлена модификация схемы с учетом данных рекомендаций.
Рис. 5. Защищенное от шумов устройство
Первое, на что следует обратить внимание, это фильтр по цепи питания микроконтроллера (C3, R4 и R5). Получены две «земли» — одна для цифровой части схемы, другая — для зашумленной аналоговой.
Второе — защита выводов микроконтроллера с помощью ФНЧ (GP2, GP3). В них рекомендуется использовать керамические конденсаторы.
Предполагается следующий алгоритм работы.
Основной цикл программы — отслеживание перехода сетевого напряжения через нуль. Когда переход обнаруживается, делается вывод о том, должен ли быть открыт симистор в данном полупериоде. Для открытия симистора на вывод контроллера GP2 выдается импульс длительностью порядка 2 мс. Преобразования значения переменного резистора привязывается к полупериодам сетевого напряжения. Во время положительного полупериода происходит заряд конденсатора, во время отрицательного — непосредственно преобразование. Исходя из частоты питающего напряжения необходимо выбирать временные параметры интегрирующей цепи (см. формулу 1). Время разряда конденсатора измеряется с помощью таймера 0.
Для управления мощностью производится пропуск периодов сетевого напряжения: полный цикл составляет 10 полупериодов, количество полупериодов, во время которого нагрузка запитывается пропорционально значению задающего резистора. Если это значение не равно нулю, то зажигается светодиод и запускается таймер на 2 часа. Перезапуск таймера происходит при смене задающего значения. По прошествии двух часов нагрузка отключается и включается лишь после сброса питания или задания нового уровня мощности.
Полученное программное обеспечение занимает порядка 130 ячеек памяти программ и использует 10 байт ОЗУ.
Полученный электронный термостат имеет множество преимуществ по сравнению со своим механическим аналогом:
- Повышенная надежность, обусловленная практически полным отсутствием механических частей.
- Встроенные механизмы защиты, такие как таймер автоматического отключения.
- Индикатор работы.
- Гибкость полученной схемы, так как возможно внутрисхемное программирование контроллера и получение на основе одного и того же конструктива устройств с различной функциональностью.
- Повышенная точность и возможность работы при малых уровнях мощности.
Возможные доработки полученной системы:
- Введение обратной связи по температуре и реализация несложного закона поддержания и регулирования температуры.
- Возможность самокалибровки.
- Дистанционное управление устройством, например, по инфракрасному или радиоканалу.
- Реализация режима фазового управления для управления лампами накаливания.
На основе предложенной схемы возможна реализация целой гаммы несложных устройств управления сетевым питанием, которые могут применяться в бытовой технике, осветительных приборах, в промышленности и сельском хозяйстве.


Design by GAW.RU
Управление симисторами в схемах на микроконтроллере
Многообразие материалов на эту тему практически не оставляет шансов на оригинальность, но кое-что можно представить, дабы сократить время на поиск нужных решений и обозначить «подводные камни». И прежде всего представить практическое, без академичности, которая векторными диаграммами управления и матрицами отпугивает многих, а привлекает только тех, кому нужен реферат потолще.
Необходимо отметить, что выбор индуктивной нагрузки, коей является двигатель, вовсе не отвергает данное решение для управления освещением или нагревательными элементами. Двигатель, достаточно капризный элемент и не всякий подходит для данной схемы. И более того, режим плавного управления мощностью двигателя не всегда удается осуществить. Это зависит от многих факторов: мощность двигателя, инерционность нагрузки на валу, реактивные и активные параметры обмоток. Для надёжного решения всех этих проблем предназначены частотные инверторы. Тем не менее, данная схема значительно проще по сложности, чем частотное управление и иногда обеспечивает приемлемые результаты.
Вот совокупность всех аспектов проблемы управления:
- Прежде всего, слово «микроконтроллер» в заглавии статьи, говорит о том, что управлять нагрузкой необходимо не потенциометром, (таких решений предостаточно), а именно микроконтроллером.
- Обязательное наличие гальванической развязки.
- Плавное управление мощностью, а не старт-стопное.
- Контроль перехода через ноль (Zero-Cross).
- Некоторые особенности выбора сглаживающего фильтра RC snubber.
- Программная реализация событий управления на примере Atmega16A.
- Обзор аналогичных решений в Интернете.
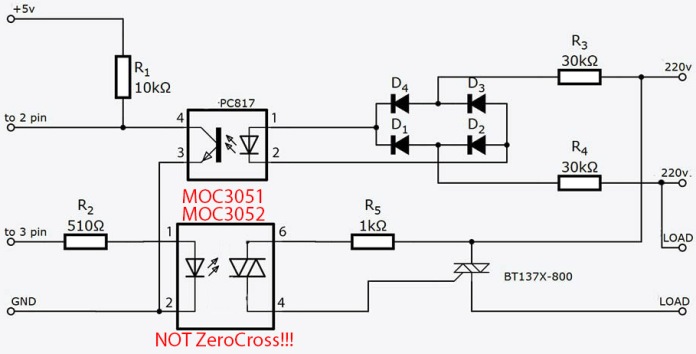
Схема 1. Узел управления нагрузкой.
Схема 2. Датчик перехода через ноль (Zero-Cross).
Цепи:
- VCC – 5 вольт, питание низковольтной части узла, полученное стабилизатором напряжения;
- GND – общая точка низковольтной части;
- DRV – выход микроконтроллера, для управления нагрузкой (PC6 для Atmega16A);
- ZERO — вход TTL-сигнала (PD2/INT0 для Atmega16A) от события перехода через ноль сети 220;
- L,N — фаза и нейтраль сети 220;
Элементы:
- MOC3052 — оптотриак (симистор), обеспечивающий гальваническую развязку;
- BT136 — триак (симистор), обеспечивающий управление мощной нагрузкой;
- BC847 – транзистор, управляющий MOC3052;
- R1,R2 – делитель, запирающий транзистор по умолчанию.
- RS,CS — сглаживающий фильтр RC snubber, необходимый только для индуктивной нагрузки.
- PC814 — оптрон датчика Zero-Cross;
- RZ0,RZ1 — токозадающие резисторы, двухваттные;
- SN74HC14D – триггер Шмидта, для повышения помехоустойчивости;
- М — двигатель, схема включения типа «звезда»;
- CF — фазосдвигающий конденсатор.
Диаграмма фазового управления.
Оптрон PC814 обладает той особенностью, что содержит два внутренних светодиода, и реагирует на разнополярное напряжение при токе 10 мА. Поэтому характер импульсов сигнала ZERO именно такой, как показано на диаграмме. На токозадающих сопротивлениях RZ0 и RZ1 падает практически всё напряжение питающей сети, поэтому на их ваттности не надо экономить. Вместо двух последовательных сопротивлений можно использовать одно, соответствующего типа.
Сигнал ZERO попадает на микроконтроллер PD2/INT0 и вызывает аппаратное прерывание ниспадающим фронтом. Как будет показано далее, программа обработки прерывания запускает счетчик, время работы которого и будет определять фазовую задержку включения симистора относительно события перехода через ноль. Сигнал DRV формируется этой задержкой. На диаграмме показано, что передний фронт сигнала DRV смещается так, что энергетика на нагрузке уменьшается синхронно, через каждые 10 миллисекунд. Этого можно достичь только программным способом.
Если задача управления нагрузкой простая (включить/выключить) , то датчик Zero-Cross можно и не применять. Однако его использование уменьшает помехи при коммутации сильноточной нагрузки, да и режим, в котором пребывает силовой симистор более щадящий и он меньше нагревается. Используя данный подход в полном объеме, можно строить достаточно сложные воздействия на двигатель.
В представленной схемотехнике имеется один не большой «подводный камушек», о который можно споткнуться. При инициализации микроконтроллера может пройти достаточное время, это связано с конкретной задачей, когда его выходные сигналы находятся в третьем состоянии. В течении этого времени необходимо запереть транзистор BC847. Иначе возможен скачек напряжения, который пройдет на нагрузку.
Сглаживающий фильтр RC-snubber.
Необходимо иметь в виду, что при отключении и включении симистора из-за реактивного сопротивления обмоток может возникать короткий бросок и даже затухающие колебания на нагрузке. Для предотвращения этих бросков служит фильтр RS, CS. В литературе по триакам приводятся номиналы этих элементов: RS = 39 Ом, CS = 0.01 мкФ. При этом для мощности RS нет рекомендаций. Мой практический опыт говорит о том, что сопротивление RS горит так, что выгорает весь узел с симистором. При этом оборудование испытывалось, собственные колебания подавлены, работа стабильная, но иногда у заказчика происходит пробой узла. Причины этих возгораний носят случайный характер и систематизации не поддаются. Можно только предположить, что причиной может быть не сам узел симистор – двигатель, а наводимая на него через питающую сеть импульсная помеха от другого оборудования.
И так, для подавления собственных колебаний представленные номиналы вполне оправданы, и вообще-то не критичны. RS должно быть того же порядка, что и активное сопротивления двух обмоток (схема «звезда»). Собственные колебания могут быть от 1 до 10кГц. На этой частоте реактивное сопротивление CS от 16кОм до 1.6кОм, поэтому всё напряжение приложено к CS. Гораздо хуже, когда возникает внешняя импульсная помеха, её параметры не известны.
Поэтому мои рекомендации таковы:
RS эквивалентно активному сопротивлению обмоток, а мощность не менее двух ватт. CS большего номинала чем 0.01 мкФ, с напряжением 400V и более.
Вот здесь есть интересные материалы на эту тему:
Программная реализация управления.
Пример программы реализован в проекте AVR-studio Ver 4.18 build 716.
- Частота процессора 8 МГц внутренняя без кварца.
- Регистр счетчика TCCR2 настроен на внутреннее прерывание с периодом 20 мкс.
- Программа обработки этого прерывания SIGNAL(SIG_OUTPUT_COMPARE2) вызывает процедуру drv_act().
- Процедура drv_act() в зависимости от флага drv_faza0 запускает счетчик задержки относительно момента перехода через ноль.
- Процедура обработки прерывания SIGNAL (SIG_INTERRUPT0) от датчика Zero-Cross управляет флагом drv_faza0.
- Весь период полуволны в 10 мс разбивается на 500 значений задержки.
- В массиве pwm_array[] заранее формируется набор задержек. Перебор индекса массива происходит в программе обработки прерывания SIGNAL (SIG_INTERRUPT0).
Более подробно см. проект.
Ниже будет описано, что можно получить, манипулируя полуволнами, но автор, работая над реальным проектом управления двигателем, не ограничился статическими значениями задержек. Для более стабильного результата была реализована следящая система поддержания заданных оборотов двигателя на основе тахометра. Программно это поддержано в процедуре NormalCtrl(), но описания этой части не входит в рамки данной статьи.
Управление двигателем с помощью манипуляций полуволнами.
- Двигатель: асинхронный , 3 фазы, 250 Ватт, 220 В, 2730 об/мин, тип АИР56В2N3.
- Фазосдвигающий конденсатор CF = 10мкФ х 400 В.
- Активное сопротивление каждой обмотки Ra = 39 Ом.
- RS = 46 Ом, CS = 0.22 мкФ.
- Двигатель не нагружен, холостой ход.
- Напряжения снимались через резистивный делитель относительно нейтрали N.
На диаграммах 1,2,3 зелёный график – напряжение на нагрузке (LOAD), жёлтый график – точка между сопротивлением RZ1 и PC814, она показывает реальные моменты перехода через ноль.
При определённой задержке фазы включения симистора, близкой к той, что показана на диаграмме 1, наблюдалась устойчивая работа двигателя на оборотах в два раза меньше максимальных. Однако незначительное уменьшение этой задержки, приводило к тому, что двигатель, постепенно разгоняясь, выходил на полные обороты и симистор открывался полностью, игнорируя управляющее воздействие.
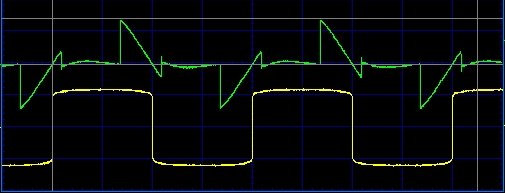
Диаграмма 1. Начало вращения, постепенный набор оборотов.
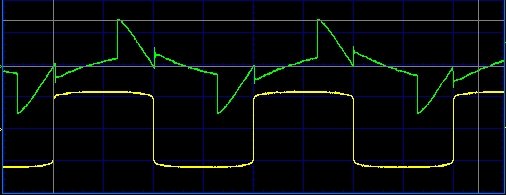
Диаграмма 2. Обороты, близкие к максимальным, вырождение участков закрытого симистора.
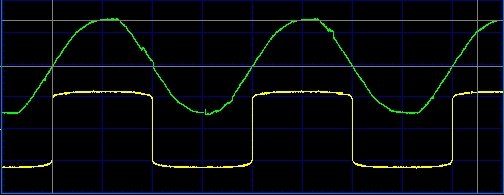
Диаграмма 2. Обороты максимальные, симистор открыт.
Можно предположить, что срыв работы симистора, как управляющего элемента, объясняется динамическим изменением реактивной составляющей сопротивления обмоток двигателя, в результате чего симистор переходит в открытое состояние. К этим сложностям добавляется то обстоятельство, что неустойчивость симистора так же зависит и от момента на валу двигателя. Если удалось подобрать фазы задержек на холостых оборотах, то при нагрузке для устойчивой работы эти параметры будут совершенно иными.
Однако же заставить работать двигатель на оборотах, кратных максимальным можно. Получить достаточно плавную регулировку, правда, не получится. Самое же проблематичное это получить вращение двигателя при оборотах в диапазоне 0.75MAX

