
Популярные заблуждения о шаговых электродвигателях и их разъяснения
Микрошаговый режим работы шагового двигателя, дробление шага
Для того, чтобы понять плюсы и минусы дробления шага (работы шагового двигателя в микрошаговом режиме), сначала стоит разобраться, что же это такое.
Микрошаговый режим – это режим, при котором происходит дробление шага большее чем 1/2 за счет получения плавно вращающегося поля статора, т.е. ток плавно снижается на одной обмотке и плавно нарастает на другой. Благодаря этому ротор шагового двигателя теоретически можно зафиксировать в любой произвольной позиции, если установить правильное отношение токов в обмотках (фазах).
Из графика видно, что увеличивая дробление шага мы дискретно приближаемся к изменению значений токов в обмотках по закону Sin, со сдвигом фаз π/2.
Теоретически, благодаря микрошаговому режиму, мы можем повысить разрешение шагового двигателя. Например, взяв двигатель с углом поворота ротора 1.8° (200 шагов на оборот), при микрошаговом режиме 1/8 получаем 800 шагов на оборот, при дроблении 1/16 – 3200 шагов на оборот и так далее. На практике же, для большинства используемых шаговых двигателей, повышение дробления шага больше 1/8 не дает ожидаемого повышения разрешения двигателя. Это происходит из-за несовершенства деталей шагового двигателя, инерции ротора, силы трения и ряда других причин.
Но, помимо увеличения разрешающей способности шагового двигателя, микрошаговый режим помогает значительно снизить вибрации и избежать резонанса на низких частотах вращения шагового двигателя, это получается благодаря меньшей длине между двумя соседними положениями ротора, что снижает влияние инерционных характеристик.
Ниже приведен результат испытаний связки шаговый двигатель + блок управления SMD 4.2 CAN в динамометрическом стенде.
Из графиков можно сделать вывод, что дробление шага отрицательно сказывается на величине максимального момента двигателя, но положительно влияет на его равномерность (особенно это видно при режиме 1/128). Так же микрошаг сильно снижает максимальное количество оборотов в минуту, которое может выдать шаговый двигатель. Это происходит из-за того, что с увеличением дробления шага, растет количество переключений напряжения, подаваемого на обмотки, что ведет к росту потерь. Поэтому в драйверах нового поколения SMD-4.2i разгон и торможение двигателя происходит в микрошаговых режимах, а при увеличении скорости драйвер автоматически понижает дробления шага в момент, когда текущее дробление не дает преимуществ над меньшим дроблением для данной частоты вращения ротора шагового двигателя.
Можно подвести итог, обозначив плюсы и минусы работы шагового двигателя в микрошаговом режиме.
Плюсы:
- повышение разрешающей способности;
- значительное снижение вибраций;
- значительное снижение шума;
- выравнивание момента;
- избегание резонанса.
Минусы:
- снижение максимальной частоты вращения ротора;
- снижение максимального момента шагового двигателя.
Василий Фортуна, Сергей Сергеев
Подпишитесь на наши новости
Получайте первыми актуальную информацию от ООО «Электропривод»
Популярные заблуждения о шаговых электродвигателях и их разъяснения

Использование шаговых двигателей является одним из самых простых, дешевых и легких решений для реализации систем точного позиционирования. Эти двигатели очень часто используются в различных станках ЧПУ и роботах. Сегодня я расскажу о том, как устроены шаговые двигатели и как они работают.
Что такое шаговый двигатель?
Прежде всего, шаговый двигатель — это двигатель. Это означает, что он преобразует электрическую энергию в механическую. Основное отличие между ним и всеми остальными типами двигателей состоит в способе, благодаря которому происходит вращение. В отличие от других моторов, шаговые двигатели вращаются НЕ непрерывно! Вместо этого, они вращаются шагами (отсюда и их название). Каждый шаг представляет собой часть полного оборота. Эта часть зависит, в основном, от механического устройства мотора и от выбранного способа управления им. Шаговые двигатели также различаются способами питания. В отличие от двигателей переменного или постоянного тока, обычно они управляются импульсами. Каждый импульс преобразуется в градус, на который происходит вращение. Например, 1.8º шаговый двигатель, поворачивает свой вал на 1.8° при каждом поступающем импульсе. Часто, из-за этой характеристики, шаговые двигатели еще называют цифровыми.
Основы работы шагового двигателя
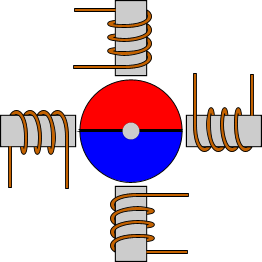
Как и все моторы, шаговые двигатели состоят из статора и ротора. На роторе установлены постоянные магниты, а в состав статора входят катушки (обмотки). Шаговый двигатель, в общем случае, выглядит следующим образом:
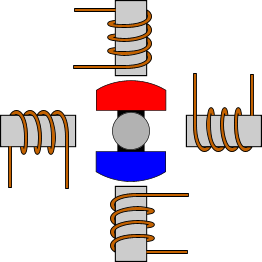
Здесь мы видим 4 обмотки, расположенные под углом 90° по-отношению друг к другу, размещенные на статоре. Различия в способах подключения обмоток в конечном счете определяют тип подключения шагового двигателя. На рисунке выше, обмотки не соединяются вместе. Мотор по такой схеме имеет шаг поворота равный 90°. Обмотки задействуются по кругу — одна за другой. Направление вращения вала определяется порядком, в котором задействуются обмотки. Ниже показана работа такого мотора. Ток через обмотки протекает с интервалом в 1 секунду. Вал двигателя поворачивается на 90° каждый раз, когда через катушку протекает ток.
Режимы управления
Теперь рассмотрим различные способы подачи тока на обмотки и увидим, как в результате вращается вал мотора.
Волновое управление или полношаговое управление одной обмоткой
Этот способ описан выше и называется волновым управлением одной обмоткой. Это означает, что только через одну обмотку протекает электрический ток. Этот способ используется редко. В основном, к нему прибегают в целях снижения энергопотребления. Такой метод позволяет получить менее половины вращающего момента мотора, следовательно, нагрузка мотора не может быть значительной.
У такого мотора будет 4 шага на оборот, что является номинальным числом шагов.
Полношаговый режим управления
Вторым, и наиболее часто используемым методом, является полношаговый метод. Для реализации этого способа, напряжение на обмотки подается попарно. В зависимости от способа подключения обмоток (последовательно или параллельно), мотору потребуется двойное напряжение или двойной ток для работы по отношению к необходимым при возбуждении одной обмотки. В этом случае мотор будет выдавать 100% номинального вращающего момента.
Такой мотор имеет 4 шага на полный оборот, что и является номинальным числом шагов для него.
Полушаговый режим
Это очень интересный способ получить удвоенную точность системы позиционирования, не меняя при этом ничего в «железе»! Для реализации этого метода, все пары обмоток могут запитываться одновременно, в результате чего, ротор повернется на половину своего нормального шага. Этот метод может быть также реализован с использованием одной или двух обмоток. Ниже показано, как это работает.
Используя этот метод, тот же самый мотор сможет дать удвоенное число шагов на оборот, что означает двойную точность для системы позиционирования. Например, этот мотор даст 8 шагов на оборот!
Режим микрошага
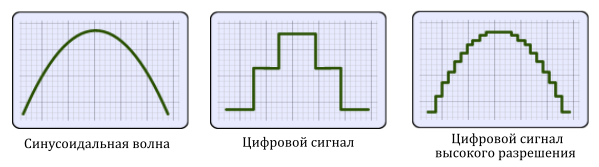
Микрошаговый режим наиболее часто применяемый способ управления шаговыми двигателями на сегодняшний день. Идея микрошага состоит в подаче на обмотки мотора питания не импульсами, а сигнала, по своей форме, напоминающего синусоиду. Такой способ изменения положения при переходе от одного шага к другому позволяет получить более гладкое перемещение, делая шаговые моторы широко используемыми в таких приложениях как системы позиционирования в станках с ЧПУ. Кроме этого, рывки различных деталей, подключенных к мотору, также как и толчки самого мотора значительно снижаются. В режиме микрошага, шаговый мотор может вращаться также плавно как и обычные двигатели постоянного тока.
Форма тока, протекающего через обмотку похожа на синусоиду. Также могут использоваться формы цифровых сигналов. Вот некоторые примеры:
 Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Метод микрошага является в действительности способом питания мотора, а не методом управления обмотками. Следовательно, микрошаг можно использовать и при волновом управлении и в полношаговом режиме управления. Ниже продемонстрирована работа этого метода:
Хотя кажется, что в режиме микрошага шаги становятся больше, но, на самом деле, этого не происходит. Для повышения точности часто используются трапецевидные шестерни. Этот метод используется для обеспечения плавного движения.
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.

Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
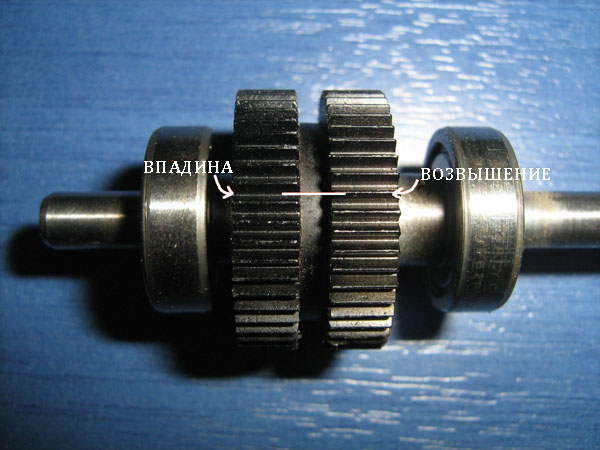
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Подключение обмоток
Шаговые двигатели относятся к многофазным моторам. Больше обмоток, значит, больше фаз. Больше фаз, более гладкая работа мотора и более выокая стоимость. Крутящий момент не связан с числом фаз. Наибольшее распространение получили двухфазные двигатели. Это минимальное количество необходимых для того, чтобы шаговый мотор функционировал. Здесь необходимо понять, что число фаз не обязательно определяет число обмоток. Например, если каждая фаза имеет 2 пары обмоток и мотор является двухфазным, то количество обмоток будет равно 8. Это определяет только механические характеристики мотора. Для упрощения, я рассмотрю простейший двухфазный двигатель с одной парой обмоток на фазу.
Существует три различных типа подключения для двухфазных шаговых двигателей. Обмотки соединяются между собой, и, в зависимости от подключения, используется различное число проводов для подключения мотора к контроллеру.
Биполярный двигатель
Это наиболее простая конфигурация. Используются 4 провода для подключения мотора к контроллеру. Обмотки соединяются внутри последовательно или параллельно. Пример биполярного двигателя:
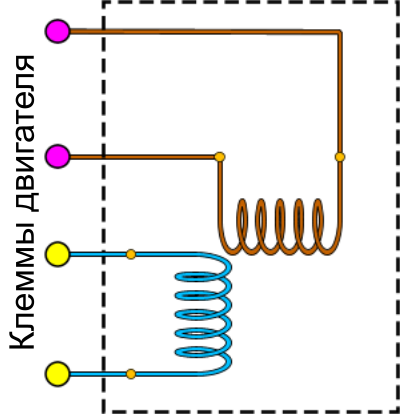
Мотор имеет 4 клеммы. Два желтых терминала (цвета не соответствуют стандартным!) питают вертикальную обмотку, два розовых — горизонтальную обмотку. Проблема такой конфигурации состоит в том, что если кто-то захочет изменить магнитную полярность, то единственным способом будет изменение направления электрического тока. Это означает, что схема драйвера усложнится, например это будет H-мост.
Униполярный двигатель
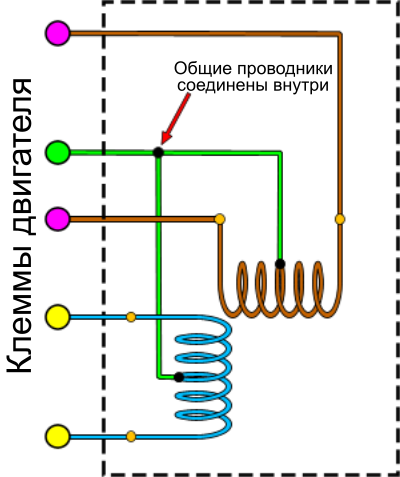
В униполярном двигателе общий провод подключен к точке, где две обмотки соединены вместе:
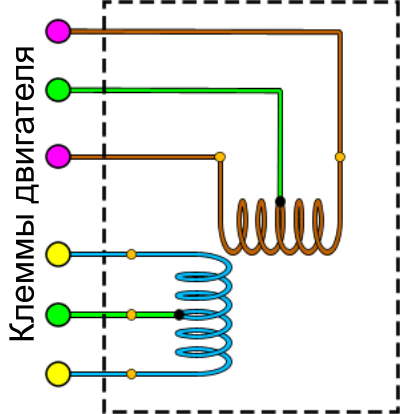
Используя этот общий провод, можно легко изменить магнитные полюса. Предположим, например, что мы подключили общий провод к земле. Запитав сначала один вывод обмотки, а затем другой — мы изменяем магнитные полюса. Это означает, что схема для использования биполярного двигателя очень простая, как правило, состоит только из двух транзисторов на фазу. Основным недостатком является то, что каждый раз, используется только половина доступных катушечных обмоток. Это как при волновом управлении двигателем с возбуждением одной обмотки. Таким образом, крутящий момент всегда составляет около половины крутящего момента, который мог быть получен, если бы обе катушки были задействованы. Другими словами, униполярные электродвигатели должны быть в два раза более габаритными, по сравнению с биполярным двигателем, чтобы обеспечить такой же крутящий момент. Однополярный двигатель может использоваться как биполярный двигатель. Для этого нужно оставить общий провод неподключенным.
Униполярные двигатели могут иметь 5 или 6 выводов для подключения. На рисунке выше продемонстрирован униполярный мотор с 6 выводами. Существуют двигатели, в которых два общих провода соединены внутри. В этом случае, мотор имеет 5 клемм для подключения.
8-выводной шаговый двигатель
Это наиболее гибкий шаговый мотор в плане подключения. Все обмотки имеют выводы с двух сторон:
Этот двигатель может быть подключен любым из возможных способов. Он может быть подключен как:
- 5 или 6-выводной униполярный,
- биполярный с последовательно соединенными обмотками,
- биполярный с параллельно соединенными обмотками,
- биполярный с одним подключением на фазу для приложений с малым потреблением тока
60 популярных повседневных заблуждений
Быки не бегут на красный цвет, Великую Китайскую стену не видно из космоса, а золотые рыбки — не самые глупые существа на планете: перечисляем эти и другие распространённые заблуждения.
Мифы об организме человека

У языка есть различные вкусовые зоны. На самом деле нет никаких зон, ответственных за различение конкретного вкуса — горького, сладкого, солёного, глутамата натрия и ГМО.
Голова остывает первой. Только новорожденные теряют тепло через голову. Для взрослых это в какой-то степени верно разве что в случае, если голова остаётся единственной непокрытой частью тела.
Нельзя плавать на полный желудок. На самом деле гораздо опасней плавать в алкогольном опьянении. Полный желудок может разве что вызвать небольшую одышку.
Бритьё делает волосы плотнее. Волосы, отрастающие после бритья, вовсе не становятся толще, жёстче или темнее; так лишь кажется по сравнению со ставшей привычной гладкой кожей.
Алкоголь согревает. Расширенные кровеносные сосуды создают ощущение тепла. На самом деле температура тела при употреблении алкоголя может упасть.
Кофеин обезвоживает. Диуретический эффект кофеина нейтрализуется количеством воды в напитке, содержащем кофеин.
Алкоголь убивает клетки мозга. Это верно только для людей, страдающих алкоголизмом, чей суточный рацион почти полностью составляет алкоголь.
Средства по уходу волосами могут вылечить волосы. Повреждённые волосы нельзя восстановить шампунем или бальзамом. Хотя некоторые могут предотвратить повреждение.
Волосы и ногти растут даже после смерти. На самом деле эффект роста создаёт обезвоживание мёртвого тела, от чего ногти и волосы начинают казаться длиннее.
Черты личности обусловливаются генами. Нет, не существует гена занудства или гена гомосексуализма.
Хрустя суставами, вы повышаете риск возникновения артрита. Последние исследования говорят о том, что это неправда. Хрустите на здоровье.
Мифы о пище

Солёная вода быстрее закипает. Сколько бы соли вы не бросили в кастрюлю, на скорость достижения температуры кипения это никак не повлияет.
Суши — это сырая рыба. «Суши» в переводе с японского означает «уксусный рис»; наличие рыбы в суши вовсе необязательно.
Алкоголь выветривается из еды при термической обработке. Нет, не весь. Так что даже ваша любимая рыба в соусе с белым вином содержит алкоголь.
Пища без глютена полезнее для здоровья. Несмотря на утверждения вашего фитнес-тренера, всё зависит от конкретных потребностей именно вашего организма.
Быстро поднятое упавшим не считается. Да, бактерия успеет заползти на оброненный вами кусочек сыра, даже если вы подняли его всего за одну секунду.
Исторические заблуждения

В Древнем Риме существовали вомитории-тошниловки. Вопреки распространённому мнению, вомиторий — это не комната для вакханалий и облегчения после обильного обеда (от англ. to vomit — испытывать тошноту, рвоту). Вомиториями называли проходы на стадион.
Наполеон был низкого роста. Рост Наполеона составлял около 167 см, что является средним ростом мужчин того времени.
Эйнштейн не понимал математику. Эйнштейн провалил вступительный экзамен по математике, но был блестящим математиком.
Железная дева как орудие смертной казни. Такое орудие пыток и казни никогда не использовалось в средневековье. «Железные девы» были созданы только в XVII веке, и то для демонстрации в цирках.
Отцы-пилигримы носили чёрную одежду. Неправда. Первые американские поселенцы позволяли себе и красную, и желтую, и синюю, и зелёную одежду. И шляп у них не было.
Элементарно, Ватсон! В книге не было этой фразы. Впервые она прозвучала в экранизации 1929 г.
Гладиаторы сражались до смертного исхода. Наиболее ценные бойцы-гладиаторы стоили целое состояние, поэтому многие из них жили долго и безбедно.
Существование короля Артура. Да, в конце V — начале VI века н.э. жил некто по имени Артур, но до сих пор неизвестно, был ли он на самом деле королём.
Заблуждения о мозге

Нельзя будить лунатиков. Если разбудить лунатика во время его ночной прогулки, он смутится, но ничего страшного не произойдёт.
Прививки приводят к аутизму. Ни одно серьёзное исследование не выявило связи между возникновением аутизма и сделанной прививкой.
Мы задействуем только 10% своего мозга. Это лишь неправильно понимаемая метафора. Работа мозга зависит от решаемых задач, и для его функционирования важны абсолютно все клетки.
Правое и левое полушарие. Нет никакого чёткого разделения способностей по полушариям; левое полушарие спокойно может выполнять функции правого и наоборот.
Шизофрения — это много личностей в одной. Технически слово «шизофрения» означает в переводе «расщеплённая личность», но это заболевание отличается от множественной личности.
Сахар приводит к гиперактивности. Синдром дефицита внимания и гиперактивности возникает и у детей, которые совсем не употребляют сахар.
У некоторых людей фотографическая память. У некоторых людей просто хорошая память. А иметь память, которая способна воссоздать события с фотографической точностью, невозможно.
Заблуждения о природе

Быки бегут на красный цвет. Быки не различают цветов. Цвет тряпки в руках тореадора не имеет никакого значения — бык реагирует лишь на его движения.
Акулы не болеют раком. Вообще-то болеют, особенно раком кожи.
Бананы растут на деревьях. На самом деле они растут на кустах, просто очень больших.
Птенцов нельзя трогать. Обоняние птиц очень ограничено, поэтому они не будут чувствовать запах человека; можно не бояться за птенчиков.
Память золотой рыбки длится 3 секунды. Золотые рыбки — не самые умные существа на свете, но продолжительность их памяти составляет 3 месяца.
У нас 5 чувств. Вообще-то около 20, включая чувство равновесия, боли, движения, голода, жажды и прочие.
Стекло — это жидкость. На самом деле стекло — это аморфное твёрдое вещество.
Летучие мыши слепы. Летучие мыши не только обладают зрением, но и используют эхолокацию.
Люди когда-то жили с динозаврами. Удивительно, но 41% американцев уверены, что это так. Мы появились на планете примерно на 63 миллиона лет позже динозавров.
Великая китайская стена. Нет, её не видно из космоса.
Смена времён года зависит от расстояния Земли до Солнца. На самом деле смена времён года связана с наклоном земной оси.
Собаки потеют с помощью слюны. На самом деле пот они выделяют через лапы, а температуру тела регулируют с помощью учащённого дыхания.
Мухи живут 24 часа. Нет. Их жизненный цикл составляет месяц.
Молния не ударяет дважды. Эмпайр-стейт-билдинг получает 100 ударов молнии в год.
Океаны голубого цвета, потому что отражают небо. Голубой цвет вызван поглощением и рассеиванием света.
Кряканье утки не создаёт эха. Это просто глупость.
Молочай смертельно ядовит. Это городская легенда.
Помидоры — это овощи. Нет, они всё ещё ягоды.
Хамелеоны меняют свой цвет под окружающую среду. Да, но таким образом они всего лишь регулируют температуру тела.
Заблуждения о религии

Адом правит сатана. В Библии об этом нет ни единого упоминания.
Мусульман-мучеников в раю ждут 72 девственницы. Точного количества «полногрудных дев» не указано в Коране, но существуют другие источники, утверждающие это. А в целом этот вопрос до сих пор не разрешён.
«Джихад» означает «Священная война». На самом деле это слово переводится просто как «борьба».
Три библейских волхва. На самом деле в Новом завете не сказано, сколько именно их было.
Заблуждения о науке

Эволюция — это всего лишь «теория». В науке теорией не принято называть просто предположение. Научная теория — это подтверждённая многочисленными исследованиями идея, объединяющая данные множества наблюдений.
Упавшая с высоты копейка может убить. Конечная скорость 50-тикопеечной монеты, упавшей с пятого этажа, составляет 50–80 км/ч, чего совершенно недостаточно, чтобы пробить случайному прохожему голову. Хотя будет больно.
Бывает голубая кровь. Кровь голубой бывает только на плакатах по анатомии, показывающих разницу между артериями и венами.
Человеку нужно потреблять 8 стаканов воды ежедневно. Не всем. Потребность в воде зависит от веса и условий окружающей среды.
ЛСД остаётся в спинномозговой жидкости несколько лет. Наркотик полностью выводится из тела через 10 часов.
Жевательная резинка переваривается 7 лет. На самом деле жевательная основа не переваривается совсем и выходит с естественными испражнениями. Остатки всасываются в кровь.
По материалам инфографики Fantastic Handyman.
Популярные заблуждения о шаговых электродвигателях и их разъяснения
Даже опытные инженеры часто имеют не совсем верное представление о шаговых электродвигателях и способах управления ими. В данной статье мы разберем лишь несколько основных заблуждений что, надеюсь, поможет и новичкам и бывалым инженерам при выборе драйверов управления. Было бы хорошо разобрать все особенности, но тогда эта статья превратилась бы в книгу.
В этой статье речь пойдет о биполярных шаговых электродвигателях, поскольку они являются наиболее популярными в использовании на сегодняшний день. Униполярные шаговые электродвигатели все еще используются в некоторых устройствах, однако их популярность с каждым годом снижается. Это снижение обуславливается преобладанием относительно недорогих драйверов для биполярных двигателей. Учитывая снижение стоимости управления, почему бы не использовать биполярные шаговые электродвигатели? В конце концов у них есть еще один плюс – больший крутящий момент.
Температура
Многие инженеры ошибочно полагают, что если шаговый электродвигатель имеет небольшой размер, значит, его температура тоже должна быть небольшой. Этот миф легко развеять, взяв документацию на электрическую машину, пирометр, и произвести замер. То, что при касании может показаться «очень горячим», на самом деле не будет даже подходить к максимально допустимой температуре машины. Шаговые электродвигатели обычно имеют повышенную температуру, это связано с внутренними процессами в самой машине. Даже когда они не вращаются они также подвержены потерям. Тем не менее, если вы сомневаетесь – перестрахуйтесь и проверьте температуру. Естественно, если температура превысит предельно допустимую, указанную в паспорте, это может привести к необратимым последствиям (выход из строя или значительное сокращение срока службы).

В случаях, когда есть необходимость снизить потребление электроэнергии в режиме простоя, можно использовать специальные драйверы, в которые данная функция включена. Однако это повлияет не только на значение тока в обмотках, но и на удерживающий момент, что в определенных механизмах тоже важно.
Микрошаговый режим
Микрошаги это не магия. Существуют специальные драйверы для микрошагового управления. Это позволяет увеличить точность позиционирования, однако достигается за счет значительного крутящего момента. Кроме того, наличие драйвера, обеспечивающего шаг 1/32, не значит, что ваш электродвигатель сможет это реализовать. После определенного порога (1/10 и иногда 1/16) требуются высококачественные драйверы и двигатели. Даже если ваш шаговый электродвигатель и драйвер смогут реализовать микрошаг в 1/32, возможно ли это интегрировать в общую систему управления?

Рассмотрим следующий пример. Линейное перемещение с 10 шагами на дюйм ходового винта напрямую соединенного с типичным шаговым двигателем, имеющим 200 шагов на оборот. Каждый полный шаг электрической машины будет переведен в 0,0005 дюйма линейного движения. Казалось бы, что, якобы, та же система микрошагов 1/32 сможет уменьшить линейный шаг до 0,000015. Но в реальности реализации данной системы практически не возможна, так как упругость и силы трения не позволят преобразовать настолько миниатюрные шаги к линейному движению.
Микрошаговый режим реально полезен при проверке системы с шаговой электрической машиной на резонанс. Это дает определенные возможности для избегания резонанса. Как известно, любая механическая система имеет резонансную частоту. Для шаговых электродвигателей достижение этой частоты, как правило, происходит на определенной скорости, после чего двигатель начнет сильно шуметь. Эти шумы могут привести к «пропусканию шагов», что чревато серьезными последствиями для определенных систем. В некоторых случаях это может привести к слишком большим вибрациям. В случаях с режущими машинами, такими как токарные станки, этот звук можно спутать с рабочим звуком обработки поверхности заготовки. Микрошаговый режим уменьшает расстояние пройденное валом между шагами (на появление шумов тратится меньше энергии).
Номинальное напряжение и напряжение питания
Наверное, одним из самых запутанных моментов является несоответствие напряжения на обмотке, указанного в паспорте машины, и реального напряжения источника питания, используемого для питания электрической машины. Если в техпаспорте указывается напряжение обмотки равное 3,4 В, то как получается, что электродвигатель подключается к источнику 48 В постоянного тока? Или иногда и к 80 В.
Номинальное напряжение не настолько критично, обратите внимание на ток.
Такое подключение стало возможным благодаря тому, что большинство современных драйверов имеют встроенное ШИМ управление выходным напряжением. Драйверы контролируют ток обмотки. Когда ток доходит до максимального значения (определяется максимальным током электрической машины), драйвер отключает питание, или снижает значение тока. При этом превышать максимальное напряжение драйвера нельзя.
Рассмотрим небольшой пример на основе шагового электродвигателя с номинальными данными: Uн = 12 В, Iн = 0,33 А, активное сопротивление обмотки R = 32,6 Ом, реактивное сопротивление обмотки L = 48 мГн.
12 В – это не максимально допустимое напряжение. Это напряжение нормальной работы, при котором в обмотке будет протекать ток равный 0,33 А.
Если вы управляете электрической машиной с помощью очень простого или Н-мостового драйвера, то вам необходимо ограничивать напряжение 12 В для предотвращения превышения номинального тока.
В случае использования драйвера с прерывателем (chopper drive), превышение номинального напряжения не является проблемой. Чем выше будет напряжение – тем быстрее машина достигнет магнитного насыщения. Приведенная ниже формула это иллюстрирует:

Приведенная формула вычисляет ток обмотки электродвигателя за определенный промежуток времени.

Ток, через катушку индуктивности 50 мГн, в течении 1 мс увеличивается пропорционально напряжению.
Если двигатель «перешагнет» прежде, чем сможет достаточно насытиться для развития необходимого момента, он начнет «терять» шаги. Если вы обнаружите, что такое происходит с вашей машиной на большом ходу – рассмотрите вариант повышения напряжения питания.
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя.
Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала.
Виды шаговых двигателей по типу ротора:
По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели.

- Двигатель с постоянными магнитами (ротор из магнитотвердого материала). На роторе установлен один, или несколько, постоянных магнитов. Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на роторе, и количества электромагнитов на статоре. Обычно в одном обороте от 4 до 48 шагов (один шаг от 7,5° до 90° ).
- Реактивный двигатель (ротор из магнитомягкого материала). Еще такие двигатели называют двигателями с переменным магнитным сопротивлением. Ротор не имеет постоянных магнитов, он выполнен из магнитомягкого материала в виде многоконечной звезды. Данные двигатели встречаются редко, так как у них наименьший крутящий момент, по сравнению с остальными, при тех же размерах. Количество полных шагов в одном обороте таких двигателей, зависит от количества зубцов на звезде ротора, и количества электромагнитов на статоре. Обычно в одном обороте от 24 до 72 шагов (один шаг от 5° до 15°.)
- Гибридный двигатель (совмещает технологии двух предыдущих двигателей). Ротор выполнен из магнитотвердого материала (как у двигателя с постоянными магнитами), но имеет форму многоконечной звезды (как у реактивного двигателя). Количество полных шагов в одном обороте таких двигателей, зависит от количества постоянных магнитов на звезде ротора, и количества электромагнитов на статоре. Количество шагов в одном обороте таких двигателей может доходить до 400 (один шаг от 0,9°).
Какой тип шагового двигателя у меня?
Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель.
Виды шаговых двигателей по типу соединения электромагнитов статора:
По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные.

На рисунке представлено упрощённое, схематическое, представление обмоток.
На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно
- Биполярный двигатель имеет 4 вывода. Выводы A и A питают обмотку AA, выводы B и B питают обмотку BB. Для включения электромагнита, на выводы обмотки необходимо подать разность потенциалов (два разных уровня), поэтому двигатель называется биполярным. Направление магнитного поля зависит от полярности потенциалов на выводах.
- Униполярный двигатель имеет 5 выводов. Центральные точки его обмоток соединены между собой и являются общим (пятым) выводом, который, обычно, подключают к GND. Для включения электромагнита, достаточно подать положительный потенциал на один из выводов обмотки, поэтому двигатель называется униполярным. Направление магнитного поля зависит от того, на какой именно вывод обмотки подан положительный потенциал.
- 6-выводной двигатель имеет ответвление от центральных точек обмоток, но обмотка AA не соединена с обмоткой BB. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения электромагнитов. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток, последовательно или параллельно.
Какой тип шагового двигателя у меня?
Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами.
Режимы работы шаговых двигателей:
- Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
- Полношаговый режим — ротор поворачивается на 1 шаг за 1 такт.
- Полушаговый режим — ротор поворачивается на ½ шага за 1 такт.
- Микрошаговый режим — ротор поворачивается на ¼, ⅛ и т.д. шагов за 1 такт.
Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°.
Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима.

Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального.

Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента.

Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку.

Если подавать уровни не «0» — «½» — «1» (как на картинке), а «0» — «¼» — «½» — «¾» — «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов).
Режимы пониженного энергопотребления — доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя.

Пример работы шаговых двигателей с разными видами роторов:

Подключение шаговых двигателей к Arduino:
Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы.
Большинство драйверов работают либо с биполярными двигателями, либо с униполярными.
- Биполярный двигатель можно подключить только к драйверу биполярных двигателей.
- 6-выводной двигатель можно подключить к любому драйверу. Если не использовать выводы центральных точек обмоток, то двигатель будет биполярным, а если эти выводы соединить и подключить к GND, то двигатель будет униполярным.
- 8-выводной двигатель является наиболее гибким в плане подключения. Данный двигатель можно не только использовать как биполярный или униполярный, но и самим определять, как соединить электромагниты обмоток внутри двигателя, последовательно или параллельно.
- Униполярный двигатель, при необходимости, можно подключить и к драйверу биполярного двигателя по простой схеме из нескольких диодов (лучше использовать диоды Шоттки), но такое подключение гарантирует корректность работы униполярного двигателя только в полношаговом режиме.
Какой тип электродвигателя лучше всего подходит для моего проекта?
Узнайте, какие проекты лучше всего работают с коллекторными двигателями постоянного тока, бесколлекторными двигателями, серводвигателями и шаговыми двигателями.
Если вы разрабатываете проекты с движущимися частями, скорее всего, вам понадобится электродвигатель. Но существует несколько различных типов электродвигателей, обычно доступных разработчикам.
Коллекторные двигатели постоянного тока, бесколлекторные двигатели, серводвигатели и шаговые двигатели – это четыре наиболее распространенных типа электродвигателей, которые можно найти практически в любом проекте, в котором есть движение. Использование каждого из этих типов двигателей в вашем проекте имеет свой набор преимуществ и потенциальных проблем.
В данной статье рассматриваются типы проектов, для которых хорошо подходит тот или иной тип двигателя, и приводятся базовые рейтинги стоимости, крутящего момента, максимальной скорости и точности позиционирования по шкале от 0 до 5.
Коллекторный двигатель постоянного тока
Коллекторные двигатели постоянного тока являются самыми дешевыми, простыми и легкими в управлении из всех технологий двигателей, обсуждаемых в данной статье. Они идеально подходят для проектов с ограниченным бюджетом, которые не требую какого-либо точного управления позиционированием, и для которых отношение мощность/масса не очень важно.
 Оценка характеристик коллекторных двигателей постоянного тока
Оценка характеристик коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока также полезны для проектов, требующих чрезвычайно простого управления. Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа. Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер.
 Пример коллекторного двигателя постоянного тока, используемого в проекте
Пример коллекторного двигателя постоянного тока, используемого в проекте
Лучшие типы проектов для коллекторных двигателей постоянного тока
Наборы для создания роботов для начинающих
Наборы для создания роботов для начинающих почти повсеместно используют коллекторные двигатели постоянного тока из-за их низкой стоимости и потому, что для их работы не требуются современные микроконтроллеры или сложное программирование.
Используя два двигателя с двумя колесами на каждой стороне шасси робота, мы можете создать достаточно сложного робота. Многие из базовых наборов робототехники такого типа доступны в магазинах.
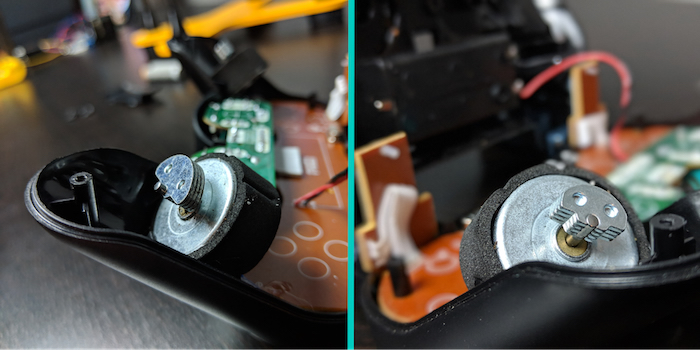
Конструкции, использующие вибромоторы
Вибромоторы состоят из коллекторного двигателя постоянного тока с грузом, прикрепленным асимметрично к валу двигателя. Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Из-за простоты управления коллекторными двигателями постоянного тока интенсивность вибрации можно модулировать, просто регулируя напряжение, подаваемое на двигатель.
Бесколлекторные двигатели
Несмотря на то, что бесколлекторные двигатели начинают заменять коллекторные двигатели постоянного тока в профессиональных устройствах и электромобилях, они также приобретают популярность в самодельных проектах благодаря наличию мощных, но доступных по цене микроконтроллеров.
 Оценка характеристик бесколлекторных двигателей
Оценка характеристик бесколлекторных двигателей  Пара примеров бесколлекторных двигателей
Пара примеров бесколлекторных двигателей
Бесколлекторные двигатели обеспечивают большую надежность, более высокие максимальные скорости и более высокую эффективность по сравнению с коллекторными двигателями постоянного тока. Однако они дороже, чем коллекторные двигатели постоянного тока, особенно с учетом того, что им требуются специализированные контроллеры скорости для взаимодействия с микроконтроллерами, что иногда может быть дороже, чем сам двигатель.
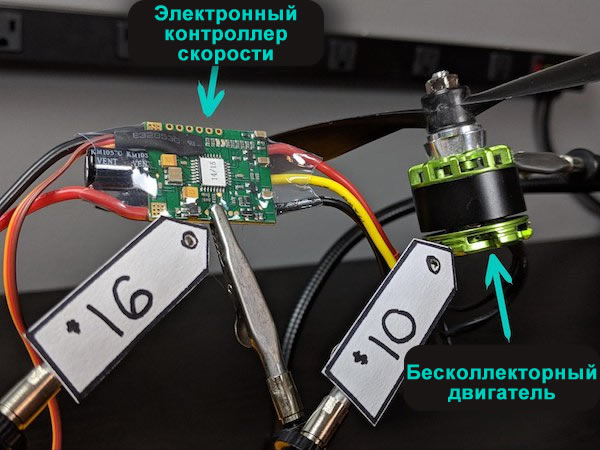 Зачастую стоимость управления бесколлекторным двигателем превышает стоимость самого двигателя
Зачастую стоимость управления бесколлекторным двигателем превышает стоимость самого двигателя
Лучшие типы проектов для бесколлекторных двигателей
Любительские проекты летательных аппаратов
Бесколлекторные двигатели чрезвычайно полезны в любительских проектах летательных аппаратов, включая квадрокоптеры, вертолеты и самолеты.
Более высокая эффективность бесколлекторных двигателей, по сравнению с коллекторными двигателями постоянного тока, имеет два основных последствия для проектов радиоуправляемых летательных аппаратов:
- Бесколлекторные двигатели потребляют меньше энергии для выработки той же мощности, что и коллекторный двигатель постоянного тока примерно такого же размера, что означает, что разработчики получают больше энергии от того же аккумулятора.
- Бесколлекторные двигатели имеют боле высокую выходную мощность при том же размере двигателя. В частности, для летательных аппаратов отношение мощности к весу является критически важной характеристикой, и бесколлекторные двигатели полезны для увеличения этого отношения.
 Бесколлекторные двигатели являются хорошим выбором для любительских проектов летательных аппаратов
Бесколлекторные двигатели являются хорошим выбором для любительских проектов летательных аппаратов
Радиоуправляемые машины
Радиоуправляемые машины, особенно те, которые используются для гонок, также выигрывают от технологий бесколлекторных двигателей. Более высокое отношение мощности к весу полезно в радиоуправляемых машинах по той же причине, что и для летательных аппаратов, для повышения производительности.
Для радиоуправляемых машин бесколлекторные двигатели обеспечивают большие крутящий момент и максимальные скорости, чем бензиновые двигатели. Кроме того, бесколлекторные двигатели в радиоуправляемых машинах обеспечивают пиковый крутящий момент почти мгновенно при подаче питания. Бензиновые двигатели, напротив, должны развивать более высокие скорости, чтобы максимизировать крутящий момент.
Стабилизатор камеры
Если вы записываете видео своего проекта, очень полезным инструментом для повышения профессионализма ваших видео за счет уменьшения тряски может стать стабилизатор камеры.
Стабилизатор камеры – это устройство, которое поддерживает камеру неподвижно, обеспечивая более плавные кадры. Стабилизаторы выполняют это, компенсируя движение, используя три бесколлекторных двигателя, по одному на каждую ось движения.
 Стабилизируйте камеру с помощью стабилизатора, состоящего из трех бесколлекторных двигателей
Стабилизируйте камеру с помощью стабилизатора, состоящего из трех бесколлекторных двигателей
Серводвигатели
В то время как коллекторные двигатели постоянного тока и бесколлекторные двигатели разработаны для регулируемой скорости, серводвигатели разработаны для точного позиционирования.
 Оценка характеристик серводвигателей
Оценка характеристик серводвигателей
Серводвигатели оснащены встроенным аппаратным обеспечением для определения положения, что позволяет контроллеру серводвигателя измерять точное угловое положение вала двигателя, также называемое углом поворота. Сочетание точного позиционирования и высокого крутящего момента, предлагаемое серводвигателями, делает их отличным выбором для ряда проектов, связанных с робототехникой.
 Примеры использования серводвигателей в проектах
Примеры использования серводвигателей в проектах
Лучшие типы проектов для серводвигателей
Шагающий робот
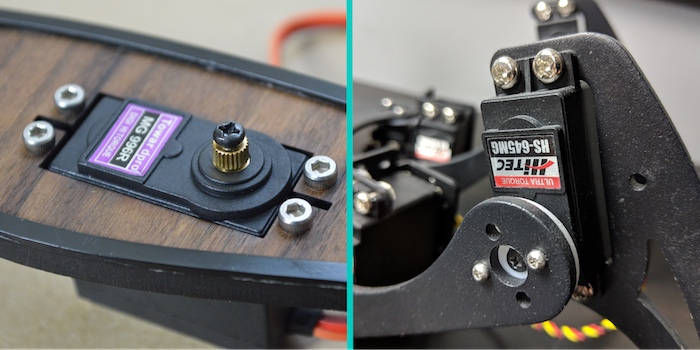
Если вы создаете шагающего робота, имеет ли он две, четыре, шесть или даже большее количество ног, серводвигатели почти наверняка будут выполнять основную работу в вашем проекте.
 В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели действуют как суставы
В шагающих роботах серводвигатели выступают в качестве суставов (и немного похожи на мышцы, но анатомическая аналогия здесь немного нарушается). Компьютер, на котором работает ваш робот, будет использовать обратную кинематику для вычисления угла, который должен принимать каждый сустав, чтобы выставить робота в определенном положении. Серводвигатели позволяют контроллеру точно управлять углом каждого сустава робота.
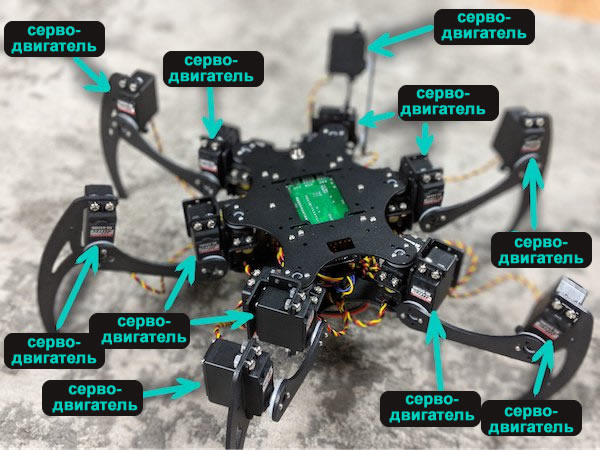 Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Если вы строите шагающего робота, то, скорее всего, вы будете использовать много серводвигателей!
Роботизированные руки
Серводвигатели также полезны для создания роботизированных рук (роботов-манипуляторов). Высокая точность позиционирования, предлагаемая серводвигателями, позволяет микроконтроллеру устанавливать конечный исполнительный механизм манипулятора с высокой степенью точности.
 Это робот-манипулятор uArm Metal, работающий на сервоприводах
Это робот-манипулятор uArm Metal, работающий на сервоприводах
Серводвигатели также обеспечивают высокий крутящий момент на низких скоростях, благодаря редуктору между двигателем и выходным валом, что позволяет роботам-манипуляторам поднимать тяжелые предметы.
Наконец, сервопривод будет сопротивляться внешним силам, пытающимся изменить положение манипулятора. Например, если вы соберете роботизированную руку и заставите ее пройти дальше точки, которую ищет микроконтроллер, то, как только вы перестанете прикладывать усилие к манипулятору, серводвигатели вернутся в исходное положение.
Шаговые двигатели (описанные в следующем разделе), напротив, не имеют механизма для определения того, изменяют ли их положение внешние силы.
Рулевое управление для радиоуправляемых машин
В радиоуправляемых машинах серводвигатели обычно используются для рулевых механизмов. Поскольку сервоприводы могут быть точно установлены в нужное положение, а затем возвращены в центральное положение, они идеально подходят для рулевого управления. Серводвигатели позволяют управлять всеми видами радиоуправляемых проектов: от рулевых реек на радиоуправляемых машинках, до рулей направления на лодках, до управляющих поверхностей на самолетах.
Шаговые двигатели
Шаговые двигатели, как и серводвигатели, предназначены для построения машин, требующих точных управления и отслеживания позиционирования.
 Оценка характеристик шаговых двигателей
Оценка характеристик шаговых двигателей
То, как шаговые двигатели позволяют управлять позиционированием, сильно отличается от способа, используемого сервоприводами. Серводвигатели имеют возможности абсолютного позиционирования. В любой момент микроконтроллер может сделать запрос контроллеру сервопривода и получить назад значение угла.
Шаговый двигатель, напротив, использует относительное позиционирование. Шаговые двигатели вращаются не непрерывно (как коллекторные двигатели постоянного тока или бесколлекторные двигатели), а дискретными «шагами»,
Типовой шаговый двигатель имеет 200 шагов на полный оборот. Таким образом, каждый раз, когда шаговый двигатель «делает шаг», он поворачивается на 1,8°. Тщательно отслеживая количество шагов, на которое шаговый двигатель повернулся из известного начального положения, микроконтроллер может с высокой степенью точности определять положение двигателя или всего, что к нему прикреплено.
 Примеры использования шаговых двигателей в проектах
Примеры использования шаговых двигателей в проектах
Лучшие типы проектов для шаговых двигателей
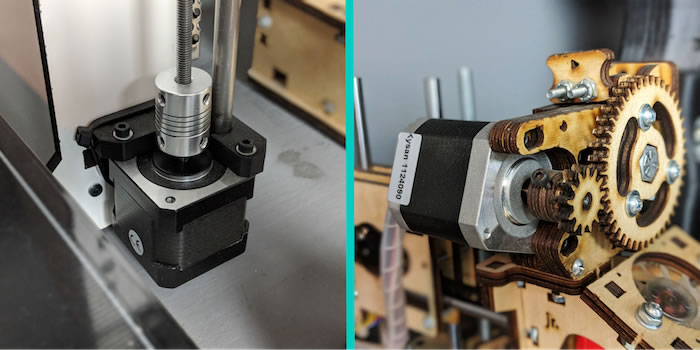
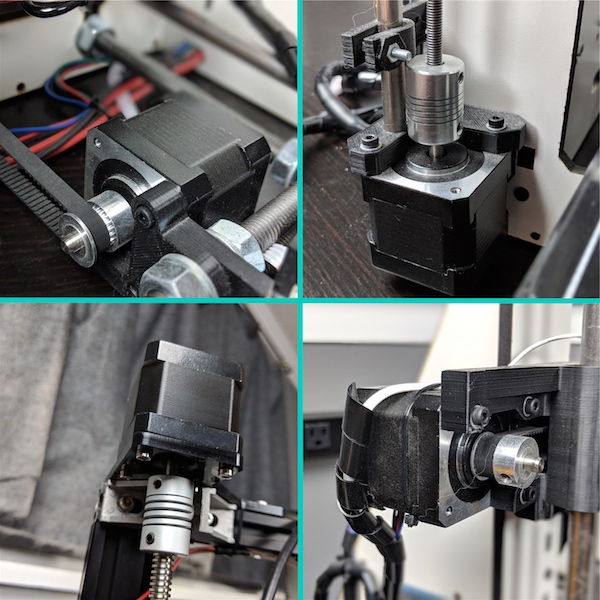
3D принтеры
Шаговые двигатели используются практически во всех настольных 3D принтерах. Эта технология двигателей позволяет контроллерам 3D принтеров отслеживать положение печатающей головки с точностью до минуты (обычно в масштабе микрометров). Кроме того, шаговые двигатели обеспечивают высокий крутящий момент на низких скоростях, что полезно для перемещения тяжелого экструдера вокруг рабочей области.
 3D принтеры используют шаговые двигатели для отслеживания положения печатающей головки
3D принтеры используют шаговые двигатели для отслеживания положения печатающей головки
Станки ЧПУ
По причинам, аналогичным 3D принтерам, шаговые двигатели широко используются в станках ЧПУ. Станок с ЧПУ запускает задание с известной нулевой позиции. Контроллер подсчитывает количество шагов, на которое перемещаются двигатели, переводя их в расстояния в соответствие с конструкцией ремней, которыми управляют шаговые двигатели. Этот тип отслеживания положения обеспечивает высокий уровень точности размеров обрабатываемых станком ЧПУ деталей.
Большие роботы-манипуляторы
В предыдущем разделе объяснялось, как в более мелких роботах манипуляторах используются серводвигатели. В более крупных роботах манипуляторах часто используются шаговые двигатели. Таким образом, если вы разрабатываете робота-манипулятора, который должен будет перемещать тяжелые грузы, дополнительный крутящий момент больших шаговых двигателей по сравнению с крутящим моментом, обеспечиваемым серводвигателями, позволит вашему роботу-манипулятору поднимать и перемещать гораздо более тяжелые объекты.
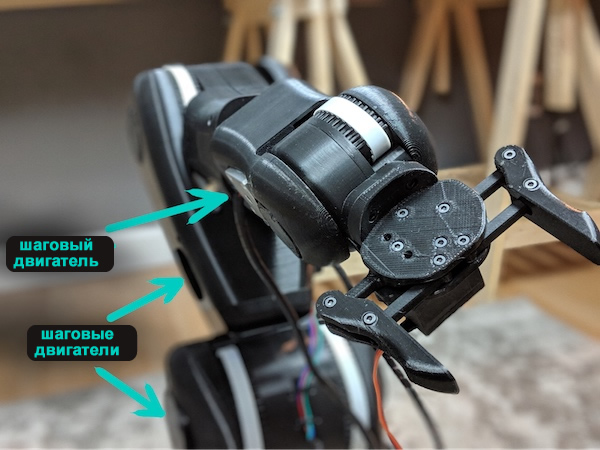 Шаговые двигатели хорошо работают в больших роботах-манипуляторах, которые требуют возможности подъема более тяжелых объектов
Шаговые двигатели хорошо работают в больших роботах-манипуляторах, которые требуют возможности подъема более тяжелых объектов
Преимущества и недостатки серводвигателей и шаговых двигателей
Для осуществления выбора приводного двигателя с целью установки на системе ЧПУ может потребоваться дополнительное время, так как следует детально изучить преимущества и недостатки каждого из двух возможных вариантов — серводвигателя либо шагового двигателя.
Касательно правильного применения терминов — привод с обратной связью и встроенным управлением можно считать сервоприводом, что касается шагового двигателя с обратной связью и встроенным управлением — такой механизм можно совершенно справедливо считать шаговым сервоприводом.
Однако в нашей стране такой термин как сервопривод применяют для обозначения привода бесколлекторного двигателя, оснащенного датчиком обратной связи — так называемым энкодером, и управлением при помощи контроллёра.
Рассмотрим и сравним два вида этих двигателей, исходя из того, что шаговым приводом правильно всё-таки считать привод с шаговым двигателем, а сервоприводом — привод с наличием обратной связи и бесколлекторного двигателя.

Сравнение
Несомненное достоинство шаговых приводов — невысокая цена по сравнению с сервоприводами. Однако при этом у шаговых двигателей есть существенный недостаток — неточность в работе и пропуск шагов из-за резонанса, возникновение которого возможно при большом рабочем поле станка (больше одного метра по каждой из осей), таким образом, крупным станкам весом более 100 кг предпочтительнее устанавливать серводвигатели.
Ещё один существенный плюс шаговых двигателей — их легко настраивать, достаточно всего лишь установить контроллёр и нажать кнопку «старт». В сравнении с ним, для подключения и настройки сервопривода понадобится как минимум программист, а также подключение дополнительных внешних устройств с интерфейсом типа MODBUS.
Работа шаговых двигателей в режиме удержания более стабильна, благодаря его дискретности шагов — порядка двухсот (или четырёхсот) шагов наоборот.
Но по сравнению с сервоприводом, у шагового гораздо медленнее старт и прекращение работы, возможно, что по инерции произойдет пропуск шагов. Поэтому в случае выбора двигателя на, к примеру, станок по монтажу печатных плат, стоит выбрать сервопривод, учитывая его высокий КПД.
Кроме того работа шагового двигателя является достаточно шумной.
Преимущества и недостатки
Подводя итоги по сравнению двух видов двигателей, стоит перечислить их преимущества и недостатки:
Преимущества серводвигателей:
1) Высокий КПД работы станка в результате точного выполнения операций и быстроте исполнения;
2) Бесшумность работы;
3) Работа без резонанса;
4) Способность работы при повышенных нагрузках в течение короткого промежутка времени.
Недостатки серводвигателей:
1) Высокая стоимость таких двигателей;
2) Система является достаточно сложной в управлении.
Преимущества шаговых двигателей:
1) При условии правильной настройки блока управления, гарантирована высокая точность работы;
3) При работе устройства на частоте меньше 15 кГц, сохраняется высокий уровень крутящего момента;
4) Низкий уровень стоимости.
Недостатки шаговых двигателей:
1) Уровень крутящего момента уменьшается при работе на высоких оборотах, даже несмотря на увеличение уровня напряжения;
2) Под действием резонанса устройство начинает работать со сбоем;
3) Отсутствует обратная связь, однако есть возможность установить энкодер;
4) При длительной работе происходит нагревание двигателя;
5) Издаёт достаточно сильный шум в процессе работы.
О шаговых двигателях и том, как их есть
Подпишитесь на автора
Подпишитесь на автора, если вам нравятся его публикации. Тогда вы будете получать уведомления о его новых постах.
Отписаться от уведомлений вы всегда сможете в профиле автора.
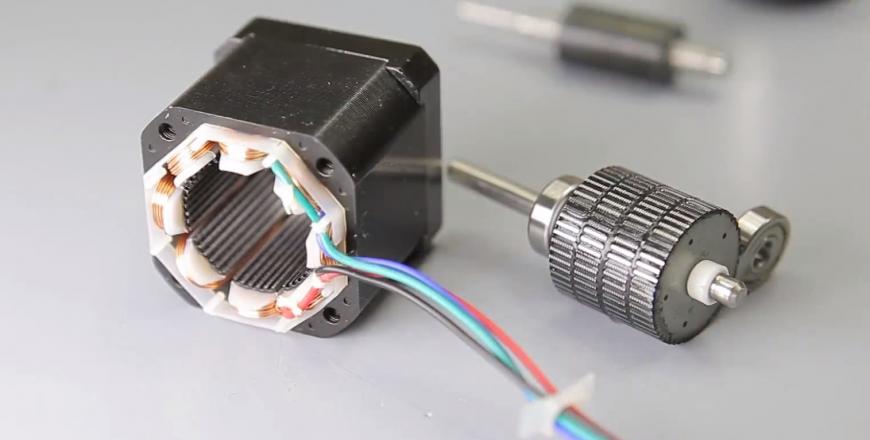
Шаговый электродвигатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Шаговый двигатель в первую очередь спроектирован не для того, что бы он просто вращался и передавал свой вращающий момент исполнительному механизму. Он должен обеспечивать высокую точность позиционирования и достаточный момент удержания.
Удерживающий момент — это то, с какой силой двигатель, если на него подан номинальный ток, будет сопротивляться попыткам его провернуть. Если подать на двигатель ток равный номинальном, это обеспечивает максимальный момент удержания.
Угол поворота — это угол поворота, на который двигатель поворачивается за один шаг (кто бы мог подумать?). Потому, иногда, его просто называют шагом и не парятся. А погрешность шага — это максимальное отклонение от заданного угла поворота в процентах.
Выходит, что чем мельче шаг, тем круче и точнее? Нет! Шаг в 1.8 градуса это всё, что вам нужно. Не буду сейчас приводить таблицы и примеры расчёта перемещений исполнительных механизмов на разных моделях принтеров и разных кинематиках. Поверьте мне на слово, лучше смотрите на погрешность шага, пользы будет больше. 5% — очень и очень хороший показатель.
И тут можно задаться вопросом, — ‘а как же напряжение?’. Напряжение особой роли не играет, т.к. его регулирует драйвер шагового двигателя, что бы поддерживать необходимый ток. Но знайте меру. 3V — 5V вполне достаточно, 3.4V, наверное, в самый раз.
Есть ещё такой параметр, как количество фаз. Ну, если совсем просто, то это сколько контактов/проводов торчит из двигателя. По хорошему, нам для принтера нужны биполярные двигатели с 4-мя фазами (проводами). Но существуют и с 6-тью и, даже, с 8-мью. Последние — экзотика в наших краях (ну я по крайней мере вообще их в руках не держал). А вот те, что с 6-тью проводами — те встречаются. Если просто, то это тоже самое, что и с 4-мя, но на обеих обмотках есть центральный отвод. Более наглядно можно посмотреть на иллюстрации, которую я честно где-то стырил.

Но я так и не сказал, что брать? Если есть 4-выводной, берём его, если нет, не расстраиваемся и берём 6-выводной. Но лучше берите 4-выводной (мороки меньше). Кстати, на картинке 8-выводной двигатель показан в режиме, когда у него пары обмоток подключены параллельно.
О чём ещё не сказал? О размерах? Ну разве ими кого-то удивишь? Наш типоразмер это Nema17, тут ничего нового. Можно и другие, но это уже снова экзотика.
Ну и последнее. Вот я купил двигатель, а дальше что? Как на нём правильно настроит ток? А всё очень просто, я уже поверхностно описывал этот процесс в одном из своих постов. Нам понадобится мультиметр, отвёртка и немного математики. Настройка тока производится методом кручения подсроечника на драйвере и снятия контрольного напряжения. Напряжение можно снимать — как на картинке.
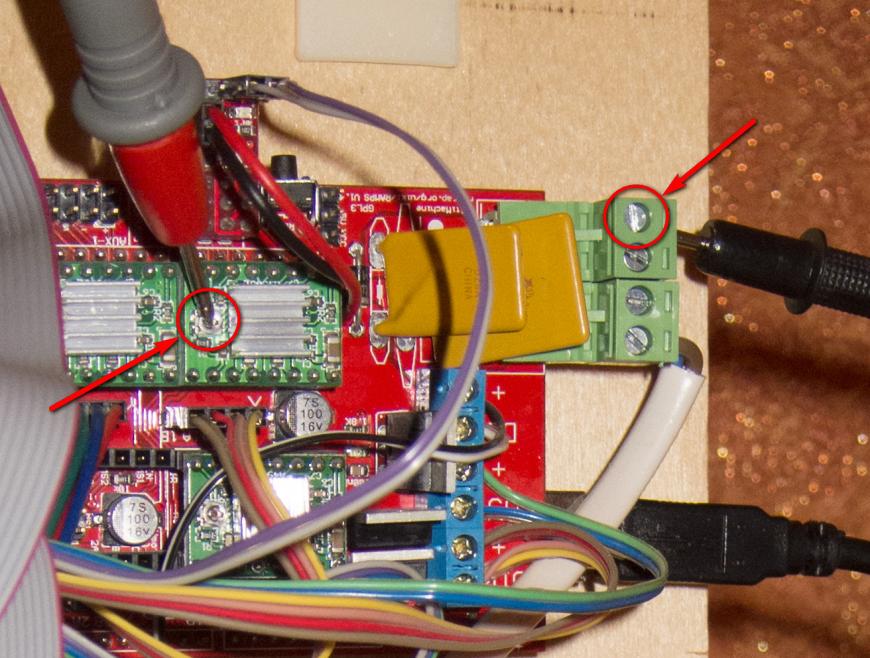
А дальше считаем по формуле, какое контрольное напряжение (Vr) нам надо выставить. Формула различается для разных драйверов.
Vr = Номинальный ток / 2,5
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 .5 = 0.68V
Vr = Номинальный ток / 2
Для двигателя с номинальным током 1.7А: Vr = 1.7A / 2 = 0,85V
Сообщества › Электронные Поделки › Блог › Как заставить работать шаговый мотор ?


Товарищи радиолюбители, доброго времени суток.
Имеются 2 БИксеноновые адаптивные линзы Hella от Opel Astra J AFL с шаговым мотором.
Необходимо заставить работать шторку ближний/дальний от 12В.
То есть, шторка в горизонтальном положении, при подачи тока шторка опускается, при прерывании тока шторка возвращаться в исходное положение.
Что для этого необходимо ?
Комментарии 64

ардуино и драйвер для шаговика, или там сервопривод?


сфоткай маркировку линзы
Вот тут все подробно описал logan174 про эти линзы
www.hidplanet.ru/forum/index.php
Тут посмотри, я видел как то там, точно ссылку не дам.
Чесно говоря не нашел там ничего.

А ты уверен что это шаговый мотор? Сколько проводов из него выходит?
И они попарно звонятся как обмотки? Если да, то это обычный биполярник. L293+L298 или L297+L298 и что-нибудь генерирующее импульсы. На контроллере (умно) или на таймере 555 или логике (тупо).

можешь сделать все на ардуино — управение шаговым двигателем, чтобы линзы всегда были горизинтально, к ардуино продается множество комплектов управления двигателем, уже готовых для шаговиков, нужно только определиться какой у тебя шаговый двигатель, и вообще ли он шаговый? может там типа безколлекторных двигатель стоит, подобные применяют на подвесе для камер в киноиндустрии и фотосъемке, они дают дастаточно быструю реакцию да изменение положения камеры. короче определяйтесь какой у вас там двигатель стоит.
принцип такой, акселерометр(тоже есть готовый для ардуино) дает сигнал в ардуино о том что машина не ровно стоит, ардуино в свою очередь через драйрев управления двигателя ставит линзу в нужной положение!
MMA7260- акселерометр
Arduino Nano — вполне хватит
два драйвера двигателя L298N (все дал на вскидку)
ну и написать программу)) если интересно сами быстро освоите для ардуино
шторка — это отдельная тема, она ни как не связана с шаговым двигателем, она просто управляется дальним светом, подключите паралельно дальнему и все…
если шаговик не нужен выкини его и все, функция шторки останется, т.е. дальний
у меня стоит моримото мини 2.5 и в сравнение с опелевским ксеноном лучше светит, сравнивали и на астре и инсигнии, везде тож адаптивная стояла оптика
.
а так то накидал бы фото с разных ракурсов, разбери вот чего у тебя там по твоему фото!

